ISSN
2307–3489 (Print), ІSSN
2307–6666
(Online)
Наука
та прогрес транспорту. Вісник
Дніпропетровського
національного університету залізничного
транспорту, 2018, №
6 (78)
МОДЕЛЮВАННЯ
ЗАДАЧ ТРАНСПОРТУ ТА ЕКОНОМІКИ
МОДЕЛЮВАННЯ
ЗАДАЧ ТРАНСПОРТУ
ТА
ЕКОНОМІКИ
UDC
004.7:004.032.26
V. M. PAKHOMOVA1*,
I. D. TSYKALO2*
1*Dep.
«Electronic Computing Machines», Dnipropetrovsk National
University
of Railway Transport named after Academician V. Lazaryan,
Lazaryan
St., 2, Dnipro, Ukraine, 49010, tel. +38 (056) 373 15 89,
e-mail
viknikpakh@gmail.com, ORCID
0000-0002-0022-099X
2*Dep.
«Electronic Computing Machines», Dnipropetrovsk National
University
of Railway Transport named after Academician V. Lazaryan,
Lazaryan
St., 2, Dnipro, Ukraine, 49010, tel. +38 (056) 373 15 89,
e-mail
ihor.tsykalo@gmail.com, ORCID
0000-0002-1629-5873
OPTIMAL ROUTE DEFINITION
IN THE NETWORK BASED ON
THE
MULTILAYER NEURAL MODEL
Purpose. The classic
algorithms for finding the shortest path on the graph that underlie
existing routing protocols, which are now used in computer networks,
in conditions of constant change in network traffic cannot lead to
the optimal solution in real time. In this regard,
the purpose of the article is to develop a methodology for
determining the optimal route in the unified computer network.
Methodology.
To determine the optimal route in the computer network, the
program model «MLP 34-2-410-34» was
developed in Python using the TensorFlow framework. It allows to
perform the following steps: sample generation (random or balanced);
creation of a neural network, the input of which is an array of
bandwidth of the computer network channels; training and testing of
the neural network in the appropriate samples. Findings. Neural
network of 34-2-410-34
configuration with
ReLU and
Leaky-ReLU
activation functions
in a hidden
layer and the
linear activation
function in the
output layer
learns from Adam
algorithm. This
algorithm is a
combination of
Adagrad, RMSprop
algorithms and
stochastic gradient
descent with
inertia. These
functions learn the most quickly in all volumes of the train sample,
less than others are subject to re-evaluation, and reach the value of
the error of 0.0024 on the control sample and in 86% determine the
optimal path. Originality. We conducted the study of
the neural network parameters based of the calculation of the
harmonic mean with different activation functions (Linear, Sigmoid,
Tanh, Softplus, ReLU, L-ReLU) on train samples of different volumes
(140, 1400, 14000, 49000 examples) and with various neural network
training algorithms (BGD, MB SGD, Adam, Adamax, Nadam). Practical
value. The use of a neural model, the input of which is an array
of channel bandwidth, will allow in real time to determine the
optimal route in the computer network.
Keywords:
computer network;
optimal route;
neural network;
sampling; harmonic
mean; activation
function; optimization
algorithm
Introduction
One
of the main requirements for routing algorithms is their rapid
matching to an optimal solution, dictated by the need for their
protocol realization in real time in the conditions of continuous
change in the characteristics of network traffic, topology and load
of computer networks used in the rail transport. Classic algorithms
for finding the shortest path on the graph used in modern routing
protocols cannot do this. One of the approaches to solving routing
problems in computer networks is the use of neural network
technology [8, 15–16]. For example, in [12] it is shown that with
the help of a neural network (NN) it is possible to find a
solution, close to the optimal, to the travelling salesman problem
and to find the shortest path on the graph. In [3] for solving
routing problems there is studied the possibility of applying the
following neural networks: Multi Layer Perceptron; RBF network;
Hopfield network. It is established that the most promising means
for solving the routing problem are the direct distribution neural
network and the Hopfield network, which are capable of operating
under conditions of dynamic change in the topology of the computer
network and the characteristics of the data transmission channels
[1–2]. In
particular,
when
using
the
Hopfield
network,
additional
research
is
required
on
the
transfer
functions
of
the
neurons
and
on
the
energy
of
the
neural
network
[18]. In [7],
it was discovered that the Hopfield network finds a satisfactory
route that differs from the optimal one by 7-8% in ave-rage (in the
case of more than 15 seats). The possibility of using the Hopfield
network to find the shortest path on the route graph in the computer
network of railway transport is analysed [5–6]. In [3], the use of
the direct distribution neural network created in MatLAB for the
purpose of determining the route in a computer network of five nodes
was investigated. But the integrated computer network of rail
transport consists of a much larger number of nodes, which requires
additional research. In particular, [20] proposed an intellectual
control subsystem with the use of network technology, [17] – a
subsystem of prediction based on a neural fuzzy network.
Purpose
To
develop a methodology for determining the optimal route in the
unified computer network based on the created software model
«MLP34-2-410-34» using the TensorFlow framework.
Methodology
A
combined computer network that works on different technologies can
be represented as an unoriented graph G
(V, W),
where V
is the set of graph vertices, the number of which is N,
with each vertex modelling a node (router) of the computer network;
W
is the set of graph edges, the number of which is M.
Each graph edge is assigned with a certain weight corresponding to
the bandwidth (the maximum amount of data transmitted by the network
per unit time):
 , (1)
, (1)
where
 – bandwidth
of the communication channel between the i-th
and j-th
network nodes, Mbps.
– bandwidth
of the communication channel between the i-th
and j-th
network nodes, Mbps.
To
solve the routing problem, it is necessary to find the optimal path
between the two routers assigned to the unified computer network. As
an example, we will consider a hypothetical computer network
whose structure is shown in Fig. 1
Let
us introduce the array:
 , (2)
, (2)
where
 –
availability
of traffic transmitted within
the network between the i-th
and j-th
vertices. As a limit
–
availability
of traffic transmitted within
the network between the i-th
and j-th
vertices. As a limit
 ,
i.e.
the variable takes value 1, if the traffic flows through the channel
(i,
j);
otherwise – 0.
,
i.e.
the variable takes value 1, if the traffic flows through the channel
(i,
j);
otherwise – 0.
As the
criterion of optimality, the following
expression is supported:
 , (3)
, (3)
where
 ,
which
guarantees
the
search
for
a
path
with
the
maximum
bandwidth.
,
which
guarantees
the
search
for
a
path
with
the
maximum
bandwidth.
If there is
no connection between the nodes of the unified computer network,
then cij = cji = 0
(hence,
 ).
).
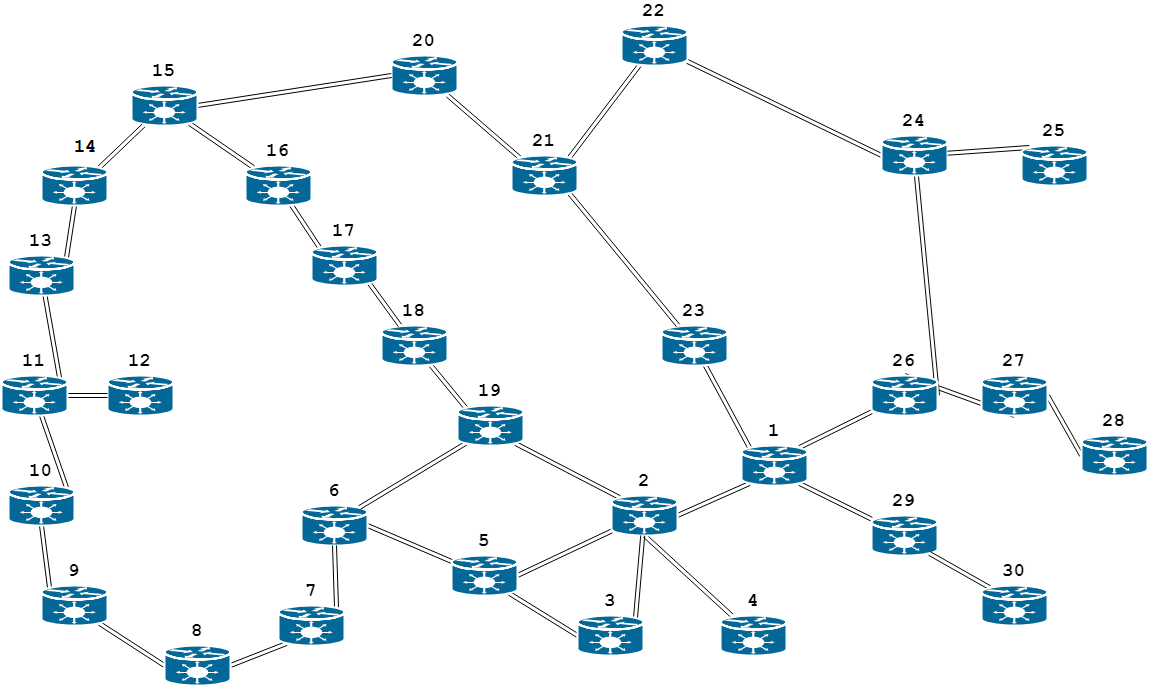
Fig.
1. Graph of router connections of unified computer network
Findings
Neural
network as the main mathematical tool for solving the problem. In
the unified computer network there are 30 routers and 34
communication channels. As an example, let us consider the solution
to the problem of determining the optimal route between the nodes
«12» and «1». Generally between the indicated nodes there are 14
unique paths.
Path
1: [12, 11, 13, 14, 15, 20, 21, 23, 1];
path
2: [12, 11, 10, 9, 8, 7, 6, 19, 2, 1];
path 3: [12, 11, 10, 9, 8,
7, 6, 5, 2, 1];
path 4: [12, 11, 10, 9, 8, 7, 6, 5, 3, 2,
1];
path 5: [12, 11, 13, 14, 15, 16, 17, 18, 19, 2, 1];
path
6: [12, 11, 13, 14, 15, 20, 21, 22, 24, 26, 1];
path 7: [12, 11,
13, 14, 15, 16, 17, 18, 19, 6, 5, 2, 1];
path 8: [12, 11, 13, 14,
15, 16, 17, 18, 19, 6, 5, 3, 2, 1];
path 9: [12, 11, 10, 9, 8, 7,
6, 19, 18, 17, 16, 15, 20, 21, 23, 1];
path 10: [12, 11, 10, 9,
8, 7, 6, 19, 18, 17, 16, 15, 20, 21, 22, 24, 26, 1];
path
11: [12, 11, 10, 9, 8, 7, 6, 5, 2, 19, 18, 17, 16, 15, 20, 21, 23,
1];
path 12: [12, 11, 10, 9, 8, 7, 6, 5, 3, 2, 19, 18, 17, 16,
15, 20, 21, 23, 1];
path 13: [12, 11, 10, 9, 8, 7, 6, 5, 2, 19,
18, 17, 16, 15, 20, 21, 22, 24, 26, 1];
path 14: [12, 11, 10, 9,
8, 7, 6, 5, 3, 2, 19, 18, 17, 16, 15, 20, 21, 22, 24, 26, 1].
To
solve the routing problem, we used the NN, whose structure is shown
in Fig. 2. To the NN input, there is applied a vector of bandwidth
of the channels of the unified computer network X,
which characterizes its current state X = {xi}, where i
= 1, ..., m
(m
= 34). For example, for NN, when using the train sample of 1,400
examples, the number of required neurons in the hidden layer is
estimated as follows:
Hence,
 .
.
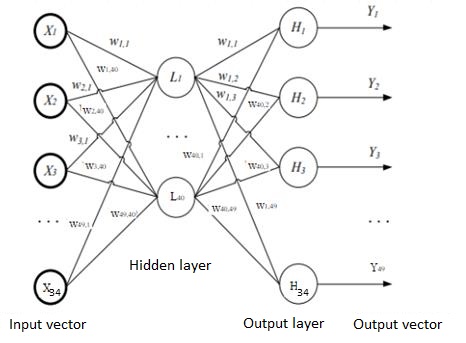
Fig. 2. Structure of
multilayer NN
Sample
preparation (preparatory stage). Formation
of the sample is carried out according to the fixed structure of the
unified computer network (see Fig. 1). The input vector X
is constructed by randomly generating channel bandwidth values
,
while these
values are formed by a uniform distribution onto the segments [100;
100,000,000]. The response vector Y
is generated by calculating the optimal path according to the
Dijkstra algorithm using the Python language of the Networkx library
(open source software library used to work with graphs and
networks).
The
samples are constructed so that each of 14 unique paths is present
at the same frequency. The test sample has 700 examples, validation
sample has 700 examples, the first train sample has 140 examples (10
examples for each path), the second train sample has 1,400 examples
(100 examples for each path), the third training sample – 14,000
examples (1,000 examples for each path), the fourth train sample –
49,000 examples (3,500 examples for each path).
All
data is initially normalized to the range from 0 to 1 by the
formula:

 (4)
(4)
The
structure of the resulting vector is as follows: Y = [y1,2,
y1,26,
y1,29,
y1,23,
y2,19,
y2,3,
y2,5,
y2,4,
y3,5,
y5,6,
y6,19,
y6,7,
y7,8,
y8,9,
y9,10,
y10,11,
y11,12,
y11,13,
y13,14,
y14,15,
y15,16,
y15,20,
y16,17,
y17,18,
y18,19,
y20,21,
y21,22,
y21,23,
y22,24,
y24,25,
y24,26,
y26,27,
y27,28,
y29,30],
where
 ,
that corresponds
to using or not using the appropriate channel in the route.
,
that corresponds
to using or not using the appropriate channel in the route.
Justifying
the choice of modelling tools.
To solve
the routing problem in the unified computer network, the Keras
library was selected using TensorFlow and Numpy in the Python
programming language [9–11,
13–14,
19].
Keras
is an open neural network library in Python language capable of
working on top of Deeplearning4, TensorFlow and Theano, designed for
quick neural network deep learning experiments.
TensorFlow
is
an
open
source
software
library
for
machine
learning.
It
is the second-generation GoogleBrain machine learning system
released as open source software.
Numpy
is an extension of the Python language that supports large,
multidimensional arrays and matrices, along with a library of
high-level mathematical functions for operations with these arrays.
Python
is an interpreted object-oriented high-level programming language
with strict dynamic typing. High-level data structures, along with
dynamic semantics and dynamic linking, make it attractive for rapid
development of applications, as well as a tool for existing
components. Python supports modules and module packages, which
facilitates modularity and reuse of the code. Python interpreter and
standard libraries are available both in compilation and in source
form on all major platforms. Python programming language supports
several programming paradigms, including: object-oriented;
procedural; functional; aspect-oriented.
Structure
of MLP 34-2-410-34 software model. MLP
34-2-40-34 software model, created for mo-delling and research,
consists of the main module «Main» and the following classes:
Generator,
MLPModel,
NetworkX,
Matplotlib,
Keras.Model,
Metrics,
Tensorflow.
The
main
module
«Main»
provides
the
menu
tasks:
1 – sample
generation;
2 – neural
network
training;
3 – neural
network
testing.
«Generator»
performs a sample preparation in two modes: random (calculating the
random number of examples for each path, Fig. 3, a);
balanced (the same number of examples for each possible path, Fig.
3, b).
For example, a sample of 140 examples in balanced mode takes 5
minutes, while in random mode it takes less than one minute.
a
b
Fig.
3. Generation of sample:
a
–random;
b
–balanced
«MLPModel»
creates a neural network of 34-2-X-34 configuration (where X is the
possible number of hidden neurons) and performs the following steps:
training; testing; control on the corresponding samples and their
normalization.
«NetworkX»
(standard class) builds a graph of the computer network (Graph),
calculates the existing paths between stations (all_simple_paths),
the path between the specified stations according to the Dijkstra
algorithm (bidirectional_dijkstra).
«Matplotlib»
(standard class) builds a pie chart and histogram to show the ratio
of the number of examples for each path.
«Keras.Model»
(standard class) performs compilation in accordance with the given
configuration of the neural network (compile), represents the
standard functions (fit, predict) that are used during the training
and testing of the neural network.
«Metrics»
performs the calculation of the pro-bability of the optimal and of
correct answers.
«TensorFlow»
(standard class) is called by the «Keras.Model» class when
performing the appropriate calculations.
The
overall structure of MLP 34-2-40-34 software model is shown in Fig.
4
In
order
to
be
able
to
unambiguously
compare
the
NN
models
in
two
parameters
– the
probability
of
optimal
responses
and
the
probability
of
correct
responses,
we
entered
the
value
of
the
harmonic
mean,
which
is
calculated
by
the
following
formula:
 , (5)
, (5)
where
 – probability
of optimal
responses,
– probability
of optimal
responses,
 – probability
of correct
responses.
– probability
of correct
responses.
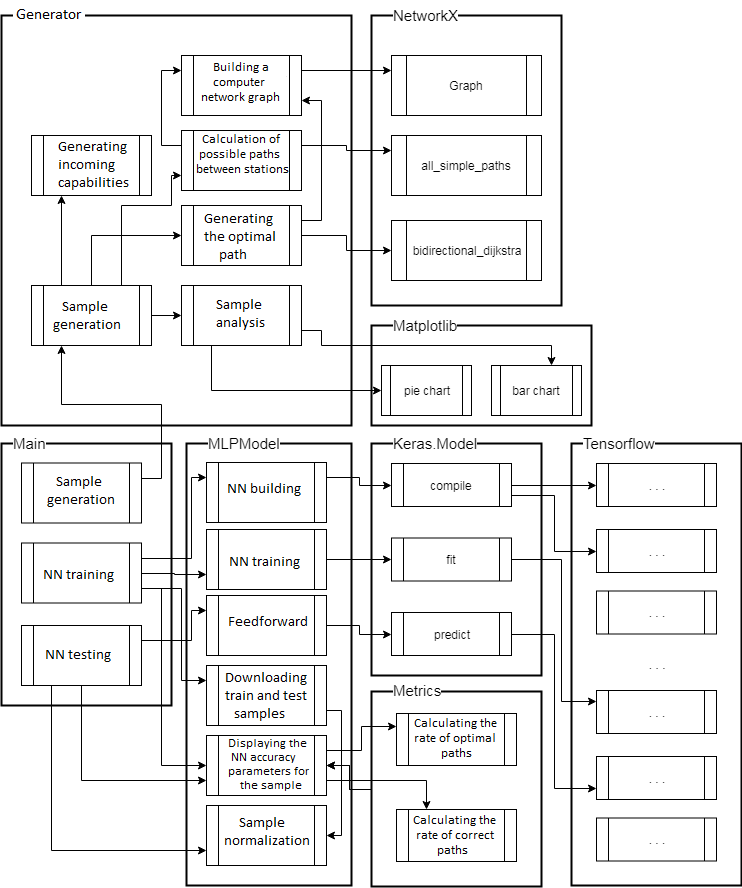
Fig. 4. Structure of MLP
34-2-40-34 software model
Testing
MLP34-2-410-34
program.
The
resulting feature vector of channel entry
to the optimal path is as follows: {0,0,0,1,0,0,0,
0,0,0,0,0,0,0,0,0,1,1,1,1,0,1,0,0,0,1,0,1,0,0,0,0,0,0},
which corresponds to the following connection of routers in the
network:1–23,
11–12, 11–13, 13–14, 14–15, 15–20, 20–21, 21–23.
The resulting path is shown in Fig. 5
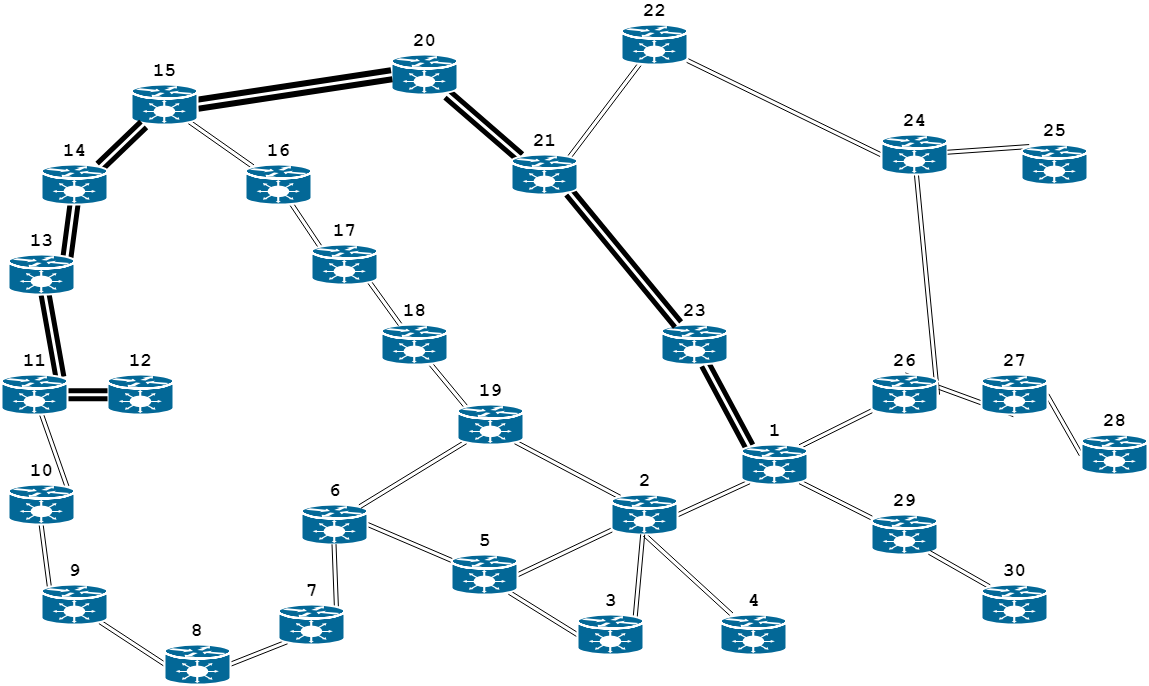
Fig.
5. The resulting optimal path consisting of channels:
12–11,
11–13, 13–14, 14–15, 15–20, 20–21, 21–23, 23–1
Table
1
Study
of NN for different number of hidden neurons
|
Number
of hidden neurons
|
62
|
410
|
760
|
1 110
|
1 456
|
|
Train sample
|
|
0.77
|
0.99
|
0.99
|
0.99
|
0.99
|
|
|
0.81
|
0.99
|
0.99
|
0.99
|
0.992
|
|
H
|
0.79
|
0.99
|
0.99
|
0.99
|
0.99
|
|
Test sample
|
|
0.55
|
0.52
|
0.51
|
0.52
|
0.51
|
|
|
0.71
|
0.7
|
0.69
|
0.7
|
0.71
|
|
H
|
0.62
|
0.6
|
0.59
|
0.6
|
0.59
|
The NN training process is
illustrated in the objective function-epoch dependency graphs for
the train and test samples in Fig. 6-10.
Fig.
6. The 34-2-64-34 NN error-epoch dependency graph on samples:
a
– train; b
– test
Fig.
7. The
34-2-410-34 NN
error-epoch
dependency
graph
on
samples:
a
– train; b
– test

Fig.
8. The
34-2-760-34 NN
error-epoch
dependency
graph
on
samples:
a
– train; b
– test
Fig
.
9. The
34-2-1110-34 NN
error-epoch
dependency
graph
on
samples:
a
– train; b
– test
Fig.
10. The
34-2-1456-34 NN
error-epoch
dependency
graph
on
samples:
a
– train; b
– test
Figures
6-10 show that all of the proposed NN models
feature
re-training after the 200th
epoch. Since the NN model of 34-2-410-34 configuration gives the
best result for a relatively small number of neurons, it is selected
for further research as the most promising one.
Study
of the NN training effectiveness for various activation functions
and train sample sizes. The
efficiency of the 34-2-410-34 NN model is studied for various neuron
activation functions in the hidden layer. The output layer has a
linear activation function. The
training
was
carried
out
using
the
stochastic
gradient
descent
algorithm
(batch
size
64) with
Adam
optimization
(learning
speed
α
= 0.001, inertia
 ,
RMSprop
,
RMSprop
 ,
,
 )
for
1,000 epochs.
Experiments
were performed for various activation functions in the hidden layer
(linear, sigmoid, hyperbolic tangent, Softplus, ReLU, Leaky-ReLU α
= 0.1; Table 2) and for different train sample sizes (140, 1,400,
14,000 and 49,000 examples). The results of NN modelling are given
in Table 2-4, the NN training process is illustrated in Fig. 11-14.
)
for
1,000 epochs.
Experiments
were performed for various activation functions in the hidden layer
(linear, sigmoid, hyperbolic tangent, Softplus, ReLU, Leaky-ReLU α
= 0.1; Table 2) and for different train sample sizes (140, 1,400,
14,000 and 49,000 examples). The results of NN modelling are given
in Table 2-4, the NN training process is illustrated in Fig. 11-14.
Fig.
11. The
MSE
error-epoch
dependency graph for train and test samples of 140 examples:
The
study showed that NN training for Softplus and Sigmoid activation
functions did not stop, and it is possible to achieve greater
accuracy during further training. In addition, one can see the
attri-butes of the NN re-training for Tanh and Softplus activation
functions.
Table
2
Study
of NN for various activation functions on train sample of 140
examples
|
Activation
function
|
Linear
|
Sigmoid
|
Tanh
|
Softplus
|
ReLU
|
L-ReLU
|
|
Train sample
|
|
0.28
|
0.58
|
1
|
0.78
|
1
|
1
|
|
|
0.32
|
0.61
|
1
|
0.78
|
1
|
1
|
|
H
|
0.3
|
0.6
|
1
|
0.78
|
1
|
1
|
|
Test sample
|
|
0.07
|
0.17
|
0.03
|
0.1
|
0.16
|
0.16
|
|
|
0.11
|
0.29
|
0.05
|
0.18
|
0.25
|
0.28
|
|
H
|
0.09
|
0.21
|
0.04
|
0.13
|
0.19
|
0.2
|
The
table shows
that on the small volumes of data the activation functions Sigmoid,
ReLU and
Leaky-ReLU
showed themselves the most successfully on the test sample.
The best
result of accuracy in training data was shown by the activation
functions Tanh, ReLU, Leaky-ReLU, so they can be considered
promising for larger sample sizes.
Fig.
12. The MSE error-epoch dependency graph for train and test samples
of 1,400 examples.
Table
3
Study of
NN for various activation functions on train sample of 1,400
examples
|
Activation
function
|
Linear
|
Sigmoid
|
Tanh
|
Softplus
|
ReLU
|
L-ReLU
|
|
Train sample
|
|
0.2
|
0.98
|
1
|
0.99
|
1
|
1
|
|
|
0.24
|
0.99
|
1
|
0.99
|
1
|
1
|
|
H
|
0.22
|
0.98
|
1
|
0.99
|
1
|
1
|
|
Test sample
|
|
0.19
|
0.53
|
0.06
|
0.3
|
0.46
|
0.46
|
|
|
0.24
|
0.7
|
0.06
|
0.35
|
0.61
|
0.61
|
|
H
|
0.21
|
0.6
|
0.6
|
0.32
|
0.53
|
0.52
|
The
table shows that on the average data volumes, Sigmoid, Tanh, ReLU
and Leaky-ReLU activation functions were most successful on the test
sample. Except for the linear activation function, all functions
have given maximum accuracy on the training data.
Table
4
Study
of NN for various activation functions on train sample of 14,000
examples
|
Activation
function
|
Linear
|
Sigmoid
|
Tanh
|
Softplus
|
ReLU
|
L-ReLU
|
|
Train sample
|
|
0.2
|
1
|
0.99
|
0.99
|
1
|
1
|
|
|
0.24
|
1
|
0.99
|
0.99
|
1
|
1
|
|
H
|
0.22
|
1
|
0.99
|
0.99
|
1
|
1
|
|
Test sample
|
|
0.19
|
0.66
|
0.57
|
0.61
|
0.76
|
0.74
|
|
|
0.24
|
0.78
|
0.63
|
0.67
|
0.86
|
0.83
|
|
H
|
0.21
|
0.71
|
0.6
|
0.64
|
0.81
|
0.79
|
The
table shows that on the data
volumes bigger than the average,
Sigmoid, ReLU and Leaky-ReLU activation functions were most
successful on the test sample. Except for the linear activation
function, all functions have given maximum accuracy on the training
data.
Fig. 13. The
MSE error-epoch dependency graph
for train and test samples of 1
14,000 examples
Table
5
Study
of NN for various activation functions
on train sample of 49,000
examples
|
Activation
function
|
Linear
|
Sigmoid
|
Tanh
|
Softplus
|
ReLU
|
L-ReLU
|
|
Train sample
|
|
0.2
|
1
|
0.96
|
1
|
1
|
1
|
|
|
0.24
|
1
|
0.96
|
1
|
1
|
1
|
|
H
|
0.22
|
1
|
0.96
|
1
|
1
|
1
|
|
Test sample
|
|
0.19
|
0.81
|
0.8
|
0.76
|
0.83
|
0.85
|
|
|
0.24
|
0.86
|
0.84
|
0.8
|
0.9
|
0.9
|
|
H
|
0.21
|
0.83
|
0.82
|
0.78
|
0.86
|
0.88
|
Fig.
14. The
MSE
error-epoch
dependency
graph
for
train
and
test
samples
of
49,000 examples
The
resulting NN of 34-2-410-34 configuration with the activation
function Leaky-ReLU (α = 0.1) in the hidden layer and the linear
activation function in the output layer after training with 49,000
examples for 1,000 epochs reached MSE value of 0.0024 on the control
sample and in 86% determines the optimal path.
Originality
and practical value
The
NN of 34-2-410-34 configuration with activation function Leaky-ReLU
(α = 0.1) in the hidden layer and with linear function in the
output layer was studied. Experiments were conducted for various
training optimization algorithms during 100 epochs for the sample
size of 49,000 examples. The results of experiments are shown in the
table 6, the training process is illustrated in Fig. 15.
According
to the results of experiments, it is evident that the NN in the
classical gradient descent learns very slowly; the NN in the
stochastic gradient descent shows a significant improvement. Adam,
AdaMax and Nadam training algorithms showed almost identical
results.
Table
6
Study
of
NN
of
34-2-410-34 configuration
by
different
algorithms
|
Algorithm
|
BGD
|
MB
SGD
|
Adam
|
Adamax
|
Nadam
|
|
Train sample
|
|
0
|
0.09
|
0.99
|
0.96
|
0.99
|
|
|
0
|
0.1
|
1
|
0.97
|
0.99
|
|
H
|
0
|
0.1
|
0.99
|
0.96
|
0.99
|
|
Test sample
|
|
0
|
0.11
|
0.87
|
0.85
|
0.87
|
|
|
0
|
0.12
|
0.92
|
0.9
|
0.92
|
|
H
|
0
|
0.11
|
0.89
|
0.87
|
0.9
|
Fig.
15. The MSE error-epoch dependency graph for train
and test
samples for different training algorithms
Conclusions
1. The
routing problem in the unified computer network is solved based on
the developed software model «MLP 34-2-410-34» using the Python
language and the TensorfFow framework, which allows generating the
samples: train (140, 1 400, 14,000, 49,000 examples); test (700
examples); control (700 examples), as well as modelling the work of
the neural network and studying its parameters.
2. Efficiency
was studied based on the harmonic mean of the NN of 34-2-X-34
configuration with sigmoid activation function in the hidden layer
and linear function in the output layer for different number of
hidden neurons: 62; 410; 760; 1 110; 1 456. During NN
training we used the modern Adam algorithm for optimizing stochastic
gradient descent with recommended hyperparameters: learning speed α
= 0.001; inertia
;
RMSprop
;
.
The study showed that the accuracy of the neural network can be
reached with 410 hidden neurons, and the further increase does
almost nothing to improve the results.
3. Efficiency was studied based
on the harmonic mean of the NN of 34-2-410-34 configuration under
different activation functions: linear; sigmoid hyperbolic
tangen-som; Softplus, ReLU; Leaky-ReLU using the Adam algorithm on
train samples of different size (140, 1 400, 14,000, 49 000
examples). The study has shown that the activation functions ReLU
and Leaky-ReLU train the most rapidly at all levels of the train
sample and less than other activation functions are subject to
re-training. The NN of 34-2-410-34 configuration for activation
functions Tanh and Softplus can achieve 100% accuracy on the train
sample, but these functions are less slowly learned than ReLU and
Leaky-ReLU and are strongly subject to re-training with
insignificant sizes of the train sample (140, 1,400 and 14,000
examples). When using the sigmoid activation function, the neural
network is also retrained, but with a large size of train examples
(49,000 examples) it is able to achieve accuracy (83%) close to
Leaky-ReLU (88%) or ReLU (86%).
4. Efficiency of the NN of
34-2-410-34 configuration was studied with activation function
Leaky-ReLU (α = 0.1) in the hidden layer and with linear function
in the output layer. Experiments were conducted by different
optimization algorithms (BGD, MB SGD, Adam, Adamax, Nadam) during
100 epochs with the train sample of 49,000 examples. Adam, Adamax,
and Nadam algorithms showed almost identical results, with 89, 87,
and 90% accuracy, respectively.
LIST OF REFERENCE LINKS
Колесніков,
К. В. Аналіз результатів дослідження
реалізації задачі маршрутизації на
основі нейронних мереж та генетичних
алгоритмів / К. В. Колесніков, А. Р.
Карапетян, В. Ю. Баган //
Вісн. Черкас. держ. технол. ун-ту. Серія:
Технічні науки. – 2016.
– № 1.
– C. 28–34.
Кутыркин,
А. В. Использование нейронной сети
Хопфилда для решения оптимизационных
задач маршрутизации :
метод.
указания / А. В. Кутиркин, А. В. Семин. –
Москва : Изд-во
Моск. гос.
ун-та путей
сообщения, 2007. – 15 с.
Павленко,
М. А. Анализ возможностей искусственных
нейронных сетей для решения задач
однопутевой маршрутизации в ТКС
[Electronic resource]
// Проблеми
телекомунікацій.
– 2011. – № 2 (4). – Avai-lable
at: http://pt.journal.kh.ua/index/0-139
– Title from
the screen.
– Accessed :
20.11.2018.
Палмер,
М. Проектирование и внедрение компьютерных
сетей / М. Палмер, Р. Б. Синклер. –
Санкт-Петербург :
БХВ-Петербург, 2004. – 752 с.
Пахомова,
В. М. Аналіз методів з природними
механізмами визначення оптимального
маршруту в комп’ютерній мережі
Придніпровської залізниці / В. М.
Пахомова, Р. О. Лепеха // Інформ.-керуючі
системи на залізн. трансп. – 2014. – №
4. – С. 82–91.
Пахомова,
В. М. Рішення задачі маршрутизації в
комп’ютерній мережі Придніпровської
залізниці на основі нейронної моделі
Хопфілда / В. М. Пахомова, Ю. О. Федоренко
// Інформ.-керуючі
системи на залізн. трансп. – 2012. – №
4. – С. 76–84.
Реалізація
задачі вибору оптимального маршруту
нейронною мережею Хопфілда / А. М.
Бриндас,
П. І. Рожак, Н. О. Семинишин,
Р. Р. Курка // Наук.
вісн. НЛТУ України
: зб. наук.-техн. пр.
– Львів, 2016. – Вип. 26.1. –
C. 357–363.
Хайкин,
С. Нейронные сети. Полный
курс : [пер.
с англ.] / С. Хайкин.
–
2-е изд.,
испр. – Москва : Вильямс, 2006. – 1104 с.
An
open source
machine
learning
framework for
everyone
[Electronic
resource] :
[веб-сайт] / TensorFlow.
– Електрон. текст. дані. – Available
at: https://www.tensorflow.org
– Title from
the screen. – Accessed
: 05.06.2018.
A
Survey of Artificial Immune System Based Intrusion Detection / Hua
Yang, Tao Li, Xinlei Hu, Feng Wang, Yang Zou //
The
Scientific World Journal. –
2014. – Vol.
2014. –
Р.
1–11.
doi:
10.1155/2014/156790
CiscoTips
[Electronic
resource] :
[веб-сайт].
– Електрон. текст.
дані. –
Available at:
http://ciscotips.ru/ospf
– Title from
the screen. – Accessed
: 20.05.2018.
Hopfield,
J. J. Neural networks and physical systems with emergent collective
computational abilities /
John
J. Hopfield // Proceedings of National Academy of Sciences. –
1982. – Vol.
79. – Іss.
8. – P.
2554-2558. doi: 10.1073/pnas.79.8.2554
IBM
[Електронний ресурс] :
[веб-сайт] / IBM
Knowledge
Center. –
Електрон. текст. дані. – Available
at: https://u.to/G-giFA
– Title
from the screen. – Accessed
: 20.05.2018.
Keras
[Electronic
resource] :
[веб-сайт]. –
Електрон. текст. дані. – Available
at: https://keras.io/
–
Title from the screen.
– Accessed :
05.06.2018.
Neural
Network Based
Near-Optimal
Routing
Algorihm /
Chang Wook Ahn, R. S.
Ramakrishna, In Chan Choi, Chung Gu Kang
// Neural
Information Processing, 2002. ICONIP'02 : Proc. of the 9th Intern.
Conf. (18–22
Nov. 2002).
–
Singapore,
2002. – Vol.
5. – P.
1771–1776.
doi: 10.1109/iconip.2002.1198978
New
algorithm for packet routing in mobile ad-hoc networks / N. S.
Kojić, M. B. Zajeganović-Ivančić,
I. S. Reljin, B. D.
Reljin // Journal of Automatic Control. – 2010. – Vol. 20.
– Іss.
1. – P. 9–16.
doi: 10.2298/jac1001009k
Pakhomova,
V. M.
Network Traffic
Forcasting in
information-telecommunication
System of
Prydniprovsk
Railways Based
on Neuro-fuzzy
Network //
Наука та прогрес транспорту. – 2016. –
№ 6 (66). – C.
105–114. doi:
10.15802/stp2016/90485
Schuler,
W. H. A novel hybrid training method for hopfield neural networks
applied to routing in communications networks / W. H. Schuler, C.
J. A. Bastos-Filho, A. L. I. Oliveira // International Journal of
Hybrid Intelligent Systems. – 2009. – Vol. 6. – Іss.
1. – P. 27–39.
doi: 10.3233/his-2009-0074
Security
Lab.ru
[Електронний ресурс] :
[веб-сайт]. – Електрон. текст. дані.
– Режим доступу: https://www.securitylab.ru/news/tags/UDP
– Назва з екрана. – Перевірено :
20.05.2018.
Zhukovyts’kyy,
I. Research of Token Ring network options in automation system of
marshalling yard /
I. Zhukovyts’kyy, V. Pakhomova
//
Transport Problems. –
2018. – Vol.
13. – Iss.
2. – P.
145–154.
В. М. ПАХОМОВА1*,
І. Д. ЦИКАЛО2*
1*Каф.
«Електронні обчислювальні машини»,
Дніпропетровський національний
університет залізничного транспорту
імені академіка В. Лазаряна,
вул.
Лазаряна, 2, Дніпро, Україна, 49010, тел.
+38 (056) 373 15 89,
ел. пошта viknikpakh@gmail.com,
ORCID 0000-0002-0022-099X
2*Каф.
«Електронні обчислювальні машини»,
Дніпропетровський національний
університет залізничного транспорту
імені академіка В. Лазаряна,
вул.
Лазаряна, 2, Дніпро, Україна, 49010, тел.
+38 (056) 373 15 89,
ел. пошта ihor.tsykalo@gmail.com,
ORCID 0000-0002-1629-5873
ВИЗНАЧЕННЯ ОПТИМАЛЬНОГО
МАРШРУТУ
В КОМП’ЮТЕРНІЙ
МЕРЕЖІ ЗАСОБАМИ
БАГАТОШАРОВОЇ
НЕЙРОННОЇ МОДЕЛІ
Мета.
Класичні алгоритми пошуку
найкоротшого шляху на графі,
що лежать в основі наявних протоколів
маршрутизації, які сьогодні використовують
у комп’ютерних мережах, в
умовах постійної зміни завантаженості
мережі не можуть привести до оптимального
рішення в реальному часі. У зв’язку з
цим метою статті є розробити методику
визначення оптимального маршруту в
об’єднаній комп’ютерній мережі.
Методика.
Для визначення
оптимального маршруту в об’єднаній
комп’ютерній мережі, що працює за
різними технологіями,
розроблено на
мові Python із використанням
фреймворку TensorFlow програмну модель
«MLP 34-2-410-34».
Вона дозволяє
виконувати наступні етапи: генерацію
вибірки (випадкову або збалансовану);
створення нейронної мережі, на вхід
якої подають масив пропускних
спроможностей каналів комп’ютерної
мережі; навчання й тестування нейронної
мережі на відповідних вибірках.
Результати.
Нейронна мережа конфігурації 34-2-410-34 з
функціями активації ReLU та Leaky-ReLU у
прихованому шарі та лінійною функцією
активації у вихідному шарі навчається
за алгоритмом Adam. Цей алгоритм є
комбінацією алгоритмів Adagrad, RMSprop та
стохастичного градієнтного спуску з
інерцією. Зазначені функції навчаються
найбільш швидко на всіх обсягах
навчальної вибірки, менш за інші
піддаються перенавчанню, й досягають
значення помилки в 0,0024 на контрольній
вибірці й у 86 % визначає оптимальний
шлях. Наукова
новизна. Проведено
дослідження параметрів нейронної
мережі на основі розрахунку середнього
гармонійного за різних функцій активації
(Linear, Sigmoid, Tanh, Softplus, ReLU, L-ReLU) на навчальних
вибірках різного обсягу (140, 1 400,
14 000, 49 000 прикладів) та за різними
алгоритмами оптимізації навчання
нейронної мережі (BGD, MB SGD, Adam, Adamax, Nadam).
Практична значимість.
Використання нейронної
моделі, на вхід якої подають значення
пропускних спроможностей каналів,
дозволить у реальному
часі визначити оптимальний маршрут в
об’єднаній
комп’ютерній мережі.
Ключові слова: комп’ютерна мережа;
оптимальний маршрут; нейронна мережа;
вибірка; середнє гармонійне; функція
активації; алгоритм оптимізації
В. Н. ПАХОМОВА1*,
И. Д. ЦЫКАЛО2*
1*Каф.
«Электронные вычислительные машины»,
Днепропетровский национальный
университет железнодорожного транспорта
имени академика В. Лазаряна,
ул. Лазаряна,
2, Днипро, Украина,
49010, тел. +38 (056) 373 15 89,
эл. почта
viknikpakh@gmail.com,
ORCID 0000-0002-0022-099X
2*Каф.
«Электронные вычислительные машины»,
Днепропетровский национальный
университет железнодорожного транспорта
имени академика В. Лазаряна,
ул. Лазаряна,
2, Днипро, Украина, 49010,
тел. +38 (056) 373 15 89,
эл. почта
ihor.tsykalo@gmail.com,
ORCID 0000-0002-1629-5873
ОПРЕДЕЛЕНИЕ ОПТИМАЛЬНОГО
МАРШРУТА
В КОМПЬЮТЕРНОЙ СЕТИ СРЕДСТВАМИ
МНОГОСЛОЙНОЙ НЕЙРОННОЙ модели
Цель.
Классические алгоритмы поиска кратчайшего
пути на графе, что лежат в основе
существующих протоколов маршрутизации,
которые сегодня используют в компьютерных
сетях, в условиях постоянного изменения
загруженности сети не могут привести
к оптимальному решению в реальном
времени. В связи с этим целью статьи
является разработать методику определения
оптимального маршрута в объединенной
компьютерной сети. Методика.
Для определения оптимального маршрута
в объединенной компьютерной сети,
которая работает по разным технологиям,
написана на языке Python с
использованием фреймворка TensorFlow
программная
модель «MLP
34-2-410-34». Она позволяет
выполнять следующие этапы: генерацию
выборки (случайную или сбалансированную);
создание нейронной сети, на вход которой
подают массив пропускных способностей
каналов компьютерной сети; обучение и
тестирование нейронной сети на
соответствующих выборках. Результаты.
Нейронная сеть
конфигурации 34-2-410-34 с функциями активации
ReLU и Leaky-ReLU
в скрытом слое и линейной функцией
активации в результирующем слое
обучается по алгоритму Adam.
Этот алгоритм является комбинацией
алгоритмов Adagrad, RMSprop
и стохастического градиентного спуска
с инерцией. Указанные функции учатся
наиболее быстро на всех объемах учебной
выборки, меньше других поддаются
переобучению, и достигают значения
ошибки в 0,0024 на контрольной выборке и
в 86 % определяют оптимальный путь.
Научная новизна.
Проведено исследование параметров
нейронной сети на основе расчета
среднего гармоничного при разных
функциях активации (Linear,
Sigmoid, Tanh,
Softplus, ReLU,
L-ReLU) на
учебных выборках разного объема (140,
1 400, 14 000, 49 000 примеров) и за
различными алгоритмами оптимизации
обучения нейронной сети (BGD,
MB SGD, Adam,
Adamax, Nadam).
Практическая значимость.
Использование нейронной модели, на
вход которой подают значения пропускных
способностей каналов, позволит в
реальном масштабе времени определить
оптимальный маршрут в объединенной
компьютерной сети.
Ключевые слова: компьютерная сеть;
оптимальный маршрут; нейронная сеть;
выборка; среднее гармоничное; функция
активации; алгоритм оптимизации
REFERENCES
Kolesnikov,
K. V., Karapetian,
A. R., & Bahan,
V. Y. (2016). Analiz rezultativ
doslidzhennia realizatsii zadachi marshrutyzatsii na osnovi
neironnykh merezh ta henetychnykh alhorytmiv.
Visnyk Cherkaskoho derzhavnoho
tekhnolohichnoho universytetu. Seriia: Tekhnichni nauky, 1,
28-34. (in
Ukraіnian)
Kutyrkin,
A. V., &
Semin, A. V. (2007). Ispolzovanie
neyronnoy seti Khopfilda dlya resheniya opti-mizatsionnykh zadach
marshrutizatsii: Metodicheskie ukazaniya. Moscow:
Izdatelstvo Moskovskogo gosu-darstvennogo
universiteta putey soobshcheniya. (in
Russian)
Pavlenko
M. A. (2011).
Analysis opportunities of artificial neural networks for solving
single-path routing in telecommunication network.
Problemy telekomunikatsii, 2(4).
Retrived from
http://pt.journal.kh.ua/index/0-139 (in
Russian)
Palmer,
M., &
Sinkler, R. B. (2004). Proektirovanie
i vnedrenie kompyuternykh setey.
St. Petersburg:
BKhV-Peterburg. (in
Russian)
Pakhomova,
V. M., &
Lepekha, R. O. (2014). Analiz metodiv z
pryrodnymy mekhanizmamy vyznachennia optymalnoho marshrutu v
komp’iuternii merezhi Prydniprovskoi zaliznytsi. Information
and control systems at railway
transport, 4, 82-91.
(in
Ukraіnian)
Pakhomova,
V. M., &
Fedorenko, Y. O. (2012). Rishennia
zadachi marshrutyzatsii v komp’iuternii merezhi Prydniprovskoi
zaliznytsi na osnovi neironnoi modeli Khopfilda. Information
and control systems at railway
transport,
4, 76-84.
(in
Ukraіnian)
Bryndas,
A. M.,
Rozhak, P. I.,
Semynyshyn, N. O.,
& Kurka,
R. R. (2016).
Realizatsiia zadachi vyboru optymalnoho marshrutu neironnoiu
merezheiu Khopfilda.
Naukovyi visnyk NLTU
Ukrainy,
26(1),
357-363.
(in
Ukraіnian)
Khaykin,
S. (2006). Neyronnye seti. Polnyy
kurs. Moscow:
Vilyams. (in
Russian)
An
open source
machine
learning
framework for
everyone.
TensorFlow.
Retrieved from
https://www.tensorflow.org (in English)
Yang,
H., Li, T., Hu, X., Wang, F., & Zou, Y. (2014). A Survey of
Artificial Immune System Based Intrusion Detection. The
Scientific World Journal, 2014, 1-11.
doi: 10.1155/2014/156790 (in
English)
CiscoTips.
Retrieved from http://ciscotips.ru/ospf
(in
Russian)
Hopfield,
J. J. (1982). Neural networks and physical systems with emergent
collective computational abilities. Proceedings
of the National Academy of Sciences, 79(8),
2554-2558. doi: 10.1073/pnas.79.8.2554 (in
English)
IBM.
IBM
Knowledge
Center.
Retrieved from
https://u.to/G-giFA
(in
Russian)
Keras.
Retrieved from https://keras.io (in
English)
Chang
Wook Ahn, Ramakrishna, R. S., In Chan Choi, & Chung Gu Kang.
(n.d.). Neural network based near-optimal routing algorithm.
Proceedings of the 9th International
Conference on Neural Information Processing, 2002. ICONIP’02.
doi: 10.1109/iconip.2002.1198978 (in
English)
Kojic,
N., Zajeganovic-Ivancic, M., Reljin, I., & Reljin, B. (2010).
New algorithm for packet routing in mobile ad-hoc networks. Journal
of Automatic Control, 20(1), 9-16.
doi: 10.2298/jac1001009k (in
English)
Pakhomovа,
V. M. (2016). Network Traffic Forcasting in
Information-telecommunication System of Prydniprovsk Railways Based
on Neuro-fuzzy Network. Science and
Transport Progress, 6(66), 105-114.
doi: 10.15802/stp2016/90485 (in
English)
Schuler,
W. H., Bastos-Filho, C. J. A., & Oliveira, A. L. I. (2009). A
novel hybrid training method for hopfield neural networks applied
to routing in communications networks1. International
Journal of Hybrid Intelligent Systems, 6(1),
27-39. doi: 10.3233/his-2009-0074 (in
English)
Security
Lab.ru.
Retrieved from
https://www.securitylab.ru
(in Russian)
Zhukovyts’kyy,
I., & Pakhomova,
V. (2018). Research
of Token Ring network options in automation system of marshalling
yard.
Transport Problems, 13(2),
145-154. (in
English)
Received:
July 27, 2018
Accepted:
Nov. 06, 2018