ISSN
2307–3489 (Print), ІSSN
2307–6666
(Online)
Наука
та прогрес транспорту. Вісник
Дніпропетровського
національного університету залізничного
транспорту, 2018, № 4
(76)
нетРАДИЦІЙНІ
ВИДИ ТРАНСПОРТУ. мАШИНИ ТА МЕХАНІЗМИ
УДК 621.867.2
В. В. СУГЛОБОВ1*, С. В. РАКША2,
Е. В. ТКАЧУК3
1*Каф.
«Подъемно-транспортные машины и детали
машин», Приазовский государственный
технический университет, ул. Университетская,
7, Мариуполь, Украина, 87500, тел. +38 (067) 623
12 69, эл. почта suglobov_v_v@ukr.net, ORCID
0000-0003-1743-0894
2Каф. «Прикладная
механика и материаловедение»,
Днепропетровский национальный
университет железнодорожного транспорта
имени академика В. Лазаряна, ул. Лазаряна,
2, Днипро, Украина, 49010, тел. +38 (067) 634 17 46,
эл. почта raksha@ukr.net,
ORCID 0000-0002-4118-1341
3Каф.
«Подъемно-транспортные машины и детали
машин», Приазовский государственный
технический университет, ул.
Университетская, 7, Мариуполь, Украина,
87500, тел. +38 (066) 149 23 49, эл. почта
ev13tk@gmail.com,
ORCID 0000-0002-0309-1644
ОПРЕДЕЛЕНИЕ ВАРЬИРУЕМЫХ
КОНСТРУКТИВНЫХ ПАРАМЕТРОВ УРАВНОВЕШИВАЮЩИХ
УСТРОЙСТВ ПОРТАЛЬНЫХ КРАНОВ
Цель. Исследование
выполнено с целью совершенствования
процесса проектирования уравновешивающего
устройства портального крана. Для ее
достижения необходимо: 1) составить
динамическую и математическую модели,
позволяющие описать движение
уравновешивающего устройства и стреловой
системы портального крана при изменении
вылета; 2) разработать методику
определения массива
варьируемых конструктивных параметров
уравновешивающих устройств; 3) рассчитать
оптимальное соотношение координат
крепления коромысла уравновешивающих
устройств и изучить их влияние на
неуравновешенность стреловой системы
портального крана.
Методика. Для определения
кинематических характеристик звеньев
уравновешивающих устройств разработаны
динамическая и математическая модели,
которые позволяют описать движение
противовеса с коромыслом при изменении
вылета стрелы. Задача
уравновешивания стреловых систем
портальных кранов сводится к определению
конструктивных параметров устройства,
которое обеспечивало бы уравновешивание
стреловой системы на всём диапазоне
вылетов. Также
разработана методика определения
приемлемых варьируемых конструктивных
параметров уравновешивающих устройств
с учётом условий подвижности, собираемости
и требований к значениям неуравновешенного
стрелового момента.
Результаты. С помощью
математического моделирования научно
обоснована целесообразность использования
предложенной методики определения
конструктивных параметров уравновешивающих
устройств. Разработанный массив
варьируемых данных позволяет учитывать
характер уравновешивания и оптимизировать
конструкцию уравновешивающих устройств
и стреловых систем портальных кранов.
Авторами выполнен
анализ влияния варьируемых параметров
на общепринятые критерии оценки качества
шарнирно-сочленённой стреловой системы:
неуравновешенность системы, вес
противовеса, показатели грузового и
стрелового неуравновешенных моментов.
Научная новизна. Впервые
предложена методика определения массива
варьируемых данных, которая позволяет
получить рациональные конструктивные
параметры уравновешивающих устройств
портальных кранов. Разработана локальная
программа для комплексного оптимизационного
синтеза, позволяющая определять
оптимальные соотношения координат
коромысла, при которых выполняются
условия уравновешенности и качества
портального крана. Практическая
значимость. Предложенная
методика определения массива варьируемых
конструктивных параметров может быть
использована при проектировании новых
и модернизации существующих уравновешивающих
устройств портальных кранов с
шарнирно-сочленёнными стреловыми
системами, что позволит снизить
материалоемкость стреловой системы и
энергопотребление кранов. С помощью
компьютерного моделирования выполнена
апробация предложенной
методики применительно
к кранам, компоновка которых обеспечивает
собираемость и подвижность звеньев
всех систем.
Ключевые слова: портальный
кран; уравновешивающее устройство;
шарнирно-сочленённая стреловая система;
синтез; конструктивные параметры;
коромысло; неуравновешенный момент
Введение
Обеспечение
уравновешивания шарнирно-сочленённой
стреловой системы является важным
требованием при проектировании
портального крана.
Существуют различные
способы и подходы, позволяющие соблюдать
условие уравновешенности [1, 5, 6, 8–13,
17–22], однако ни один из них не даёт
возможности корректировать и улучшать
параметры шарнирно-сочленённой стреловой
системы на реальных, введённых в
эксплуатацию, портальных
кранах.
В реальной конструкции
крана возможности варьирования очень
ограничены. Изменение некоторых
параметров вообще невозможно, так как
это потребует дорогостоящей реконструкции
крана.
На структурной
схеме уравновешивающего устройства
портального крана (рис. 1) указаны звенья,
значения которых существенно влияют
на общую компоновку и материалоёмкость
крана. К ним относятся:
 – расстояние от оси качания стрелы
до места крепления тяги противовеса,
– расстояние от оси качания стрелы
до места крепления тяги противовеса,
 –
длина тяги противовеса,
–
длина тяги противовеса,
 –
длина переднего плеча коромысла,
–
длина переднего плеча коромысла,
 –
расстояние от оси качания стрелы до
точки крепления противовеса,
–
расстояние от оси качания стрелы до
точки крепления противовеса,
 – расстояние по горизонтали
от оси качания стрелы до оси качания
коромысла,
– расстояние по горизонтали
от оси качания стрелы до оси качания
коромысла,
 – расстояние по вертикали
от оси качания стрелы до оси качания
коромысла,
– расстояние по вертикали
от оси качания стрелы до оси качания
коромысла,
 – вес противовеса.
– вес противовеса.
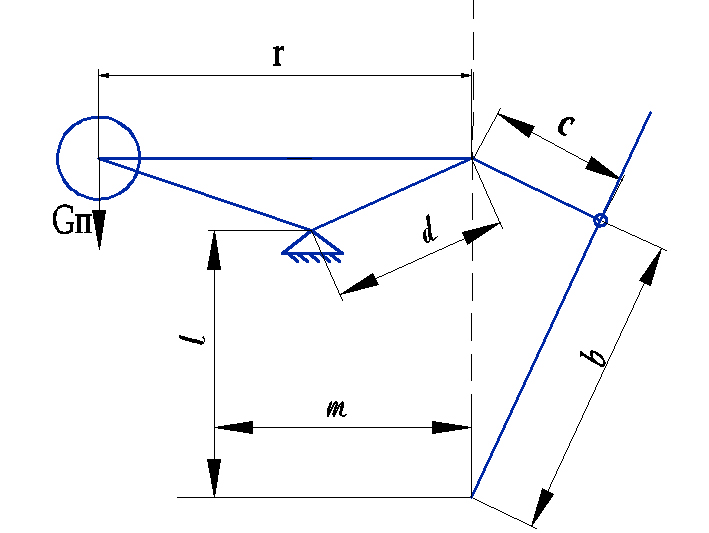
Рис.
1. Структурная схема уравновешивающего
устройства портального крана
Fig.
1. Structural diagram of balancing unit of the portal crane
Цель
Основной целью
данного исследования является расчёт
варьируемых параметров уравновешивающих
устройств портальных кранов и
определение массива конструктивных
данных для автоматизированного синтеза.
Для достижения цели в исследовании
предусмотрено:
1) разработать
динамическую и математическую модели,
которые описывают движение уравновешивающего
устройства и стреловой системы при
изменении вылета; 2) разработать методику
расчёта и определения массива варьируемых
конструктивных параметров уравновешивающего
устройства; 3) рассчитать оптимальное
соотношение координат крепления
коромысла уравновешивающего устройства
и изучить их влияние на неуравновешенность
стреловой системы портального крана.
Методика
Для определения
кинематических характеристик звеньев
уравновешивающих устройств разработаны
динамическая и математическая модели,
которые позволяют описать движение
противовеса с коромыслом при изменении
вылета стрелы. Задача уравновешивания
стреловых систем портальных кранов
сводится к определению конструктивных
параметров устройства, которое
обеспечивало бы уравновешивание
стреловой системы на всём диапазоне
вылетов. Также разработана методика
определения приемлемых варьируемых
конструктивных параметров уравновешивающих
устройств с учётом условий подвижности,
собираемости и требований к значениям
неуравновешенного стрелового момента.
Результаты
При теоретических
исследованиях уравновешивающего
устройства и синтеза шарнирно-сочленённой
стреловой системы авторами представлены
соответствующие динамические модели
[15].
1. Разработка
динамических моделей шарнирно-сочленённой
стреловой системы и уравновешивающего
устройства портального крана. Динамическая
модель шарнирно-сочленённой стреловой
системы (рис. 2) характеризуется
геометрическими и инерционными
параметрами [15].
За основу взята
стреловая система, грузовой канат в
которой проходит параллельно жёсткой
оттяжке.
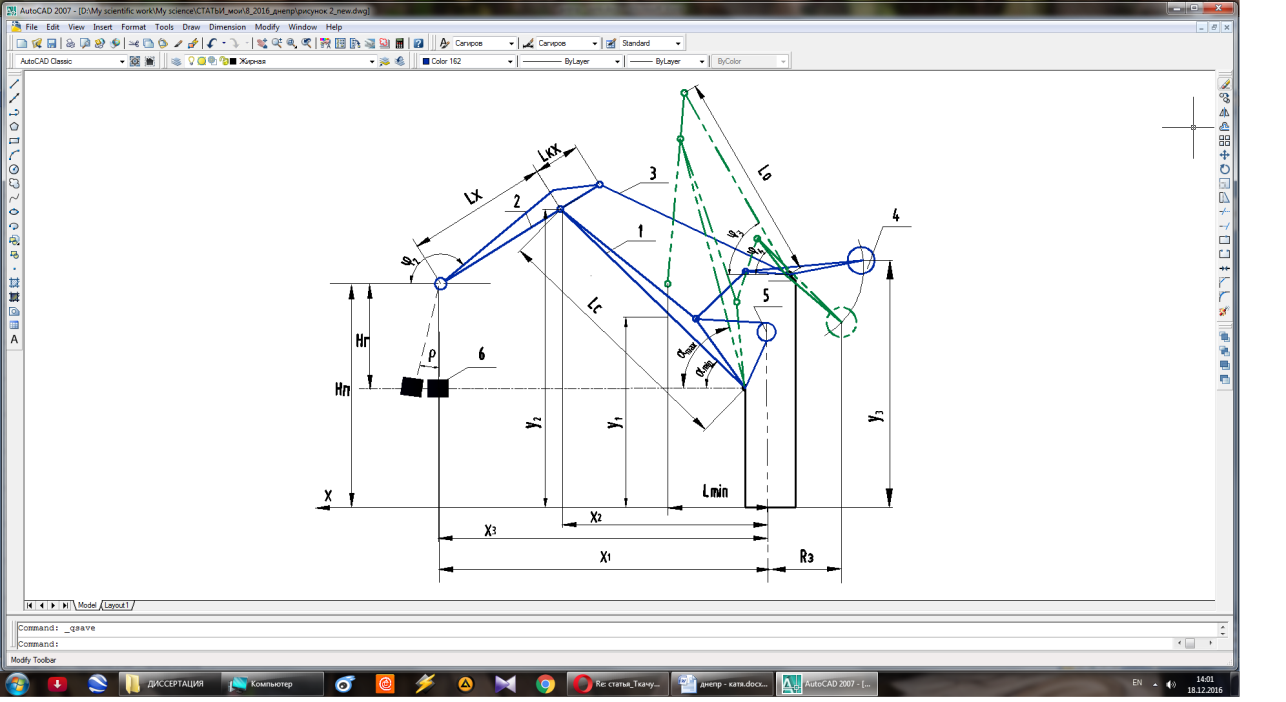
Рис.
2. Динамическая модель
шарнирно-сочленённой
стреловой системы портального крана:
1
–
стрела;
2 –
хобот; 3
– оттяжка;
4
– коромысло с противовесом; 5
–
привод механизма изменения вылета; 6
– груз
Fig.
2. The dynamic model of articulated boom system of the portal crane:
1
– boom;
2
– horse-head
jib;
3
– guy;
4
– counterweighted balance beam;
5
– derricking mechanism drive;
6
– load
Геометрические
параметры следующие:
 – длина хобота,
– длина хобота,
 –
длина контрхобота,
–
длина контрхобота,
 –
длина стрелы,
–
длина стрелы,
 –
длина оттяжки,
–
длина оттяжки,
 – высота подъёма груза,
– высота подъёма груза,
 – высота подвеса груза,
– высота подвеса груза,
 – величина заднего габарита,
– величина заднего габарита,
 – уголовая координата стрелы,
– уголовая координата стрелы,
 – угол отклонения
грузового каната от вертикали,
– угол отклонения
грузового каната от вертикали,
 ,
,
 ,
,
 – вертикальные координаты центров
тяжести стрелы, хобота, противовеса,
– вертикальные координаты центров
тяжести стрелы, хобота, противовеса,
 ,
,
 – горизонтальные координаты центров
тяжести груза и хобота,
– горизонтальные координаты центров
тяжести груза и хобота,
 – горизонтальная координата оси блока
хобота,
– горизонтальная координата оси блока
хобота,
 ,
,
 ,
,
 ,
,
 – угловые координаты ротора
электродвигателя механизма изменения
вылета стрелы, хобота, оттяжки и
противовеса,
– угловые координаты ротора
электродвигателя механизма изменения
вылета стрелы, хобота, оттяжки и
противовеса,
 – минимальный вылет стрелы,
– минимальный вылет стрелы,
 – максимальный вылет стрелы.
– максимальный вылет стрелы.
К
инерционным параметрам относят:
 ,
,
 ,
,
 ,
,
 ,
– масса стрелы, хобота в сборе с
контрхоботом, оттяжки, противовеса и
груза,
,
– масса стрелы, хобота в сборе с
контрхоботом, оттяжки, противовеса и
груза,
 ,
,
 ,
,
 ,
,
 ,
,
 – моменты инерции относительно
собственных осей вращения ротора
электродвигателя механизма изменения
вылета, стрелы, хобота, оттяжки,
противовеса [15].
– моменты инерции относительно
собственных осей вращения ротора
электродвигателя механизма изменения
вылета, стрелы, хобота, оттяжки,
противовеса [15].
К параметрам
динамической модели уравновешивающего
устройства (рис. 3) относят:
 – расстояние между противоположными
точками противовеса и тяги,
– расстояние между противоположными
точками противовеса и тяги,
 – рабочая часть зубчатой рейки механизма
изменения вылета стрелы,
– рабочая часть зубчатой рейки механизма
изменения вылета стрелы,
 – длина опорной стойки противовеса,
– длина опорной стойки противовеса,
 – длина опорной стойки приводного
механизма,
– длина опорной стойки приводного
механизма,
 – длина тягового плеча противовеса,
– длина тягового плеча противовеса,
 – длина кронштейна противовеса,
– длина кронштейна противовеса,
 – длина тяги уравновешивающего
устройства,
– длина тяги уравновешивающего
устройства,
 – длина стрелового плеча механизма
уравновешивания,
– длина стрелового плеча механизма
уравновешивания,
 – длина стрелового плеча приводного
механизма,
– длина стрелового плеча приводного
механизма,
 – угол наклона к горизонту опорной
стойки противовеса,
– угол наклона к горизонту опорной
стойки противовеса,
 – угол наклона к горизонту
опорной стойки механизма изменения
вылета,
– угловая координата
противовеса,
– угол наклона к горизонту
опорной стойки механизма изменения
вылета,
– угловая координата
противовеса,
 – угол раскрытия коромысла.
– угол раскрытия коромысла.
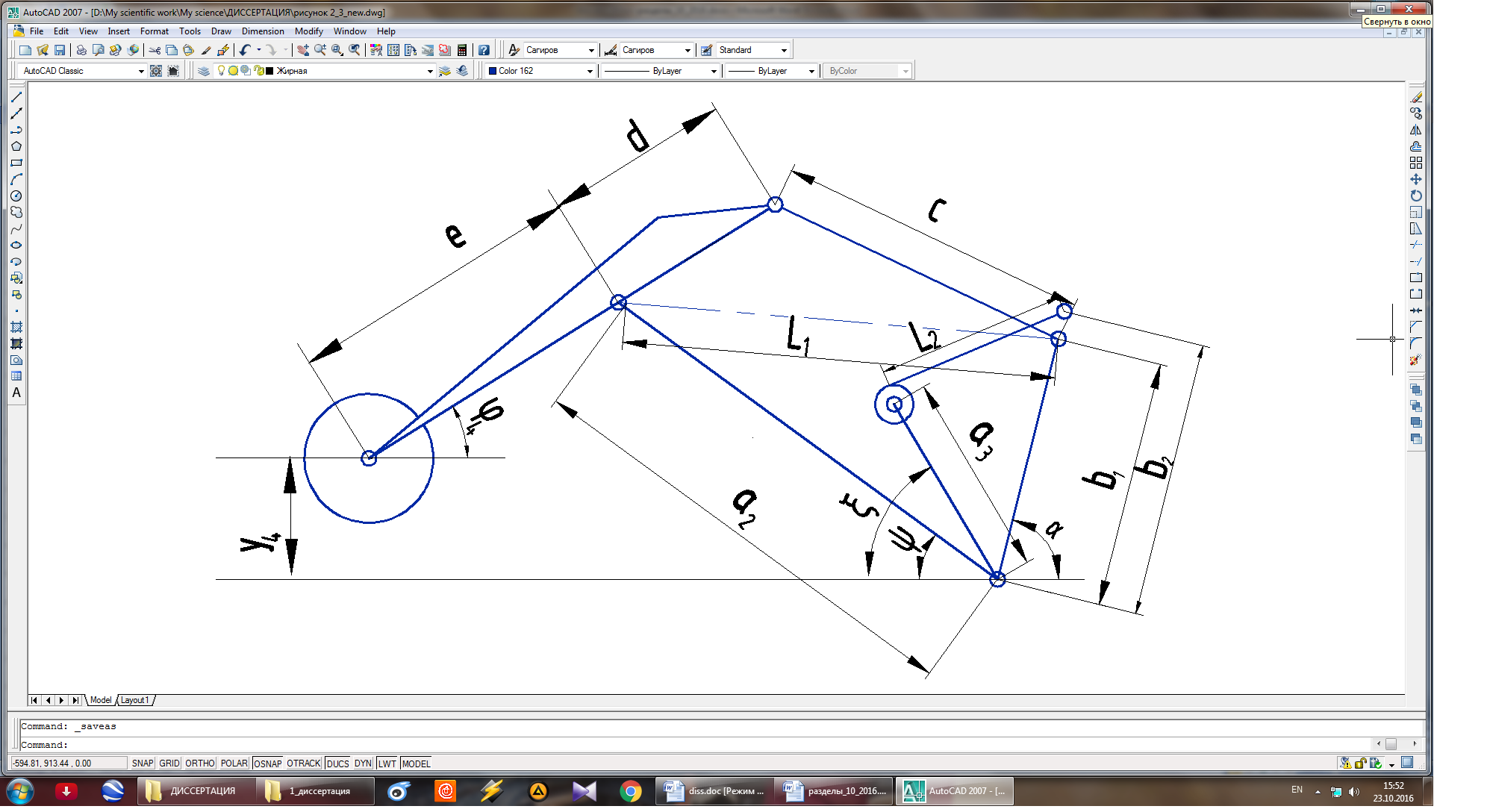
Рис.
3. Динамическая модель уравновешивающего
устройства портального крана
Fig.
3. Dynamic model of the balancing
unit of the portal crane
2. Разработка
математической модели уравновешивающего
устройства и стреловой системы
портального крана. Исходные данные
математической модели, исходя из
рекомендаций [2, 6, 7], могут
состоять из её кинематической схемы,
геометрии масс и характеристик цикла
движения.
Изменение положения
стрелы приводит к изменению положения
других звеньев, которые определяются
координатами хобота –
,
;
оттяжки –
;
противовеса –
;
груза –
.
Противовес с
коромыслом выполняет вращательное
движение вокруг своей оси. Это движение
можно записать при помощи двух координат:
– вертикальной:
 (1)
(1)
– угловой:
 (2)
(2)
Момент противовеса
должен полностью уравновесить момент
стреловой системы и часть грузового
неуравновешенного момента:
Достичь полного
уравновешивания на всем диапазоне
вылетов невозможно, потому что момент
стреловой системы и момент противовеса
изменяются в зависимости от угла наклона
стрелы при изменении вылета –
Наиболее приемлемой
показала себя усовершенствованная
математическая модель уравновешенной
шарнирно-сочленённой стреловой системы
(3), которая учитывает невозможность
полного уравновешивания и наличие
неуравновешенного стрелового момента:
 (3)
(3)
3. Методика
определения массива варьируемых
конструктивных параметров уравновешивающего
устройства. Задача уравновешивания
стреловых систем портальных кранов
сводится к определению конструктивных
параметров уравновешивающего устройства,
которое обеспечивало бы уравновешивание
стреловой системы на всём диапазоне
вылетов.
Неуравновешенный
момент на максимальном вылете должен
действовать в сторону уменьшения, на
минимальном вылете – в сторону увеличения
грузового момента, а на промежуточных
вылетах иметь одну или несколько точек
устойчивого равновесия стреловой
системы, к которым она будет стремиться
в случае отказа механизма (рис. 4) [5, 8,
14–16].
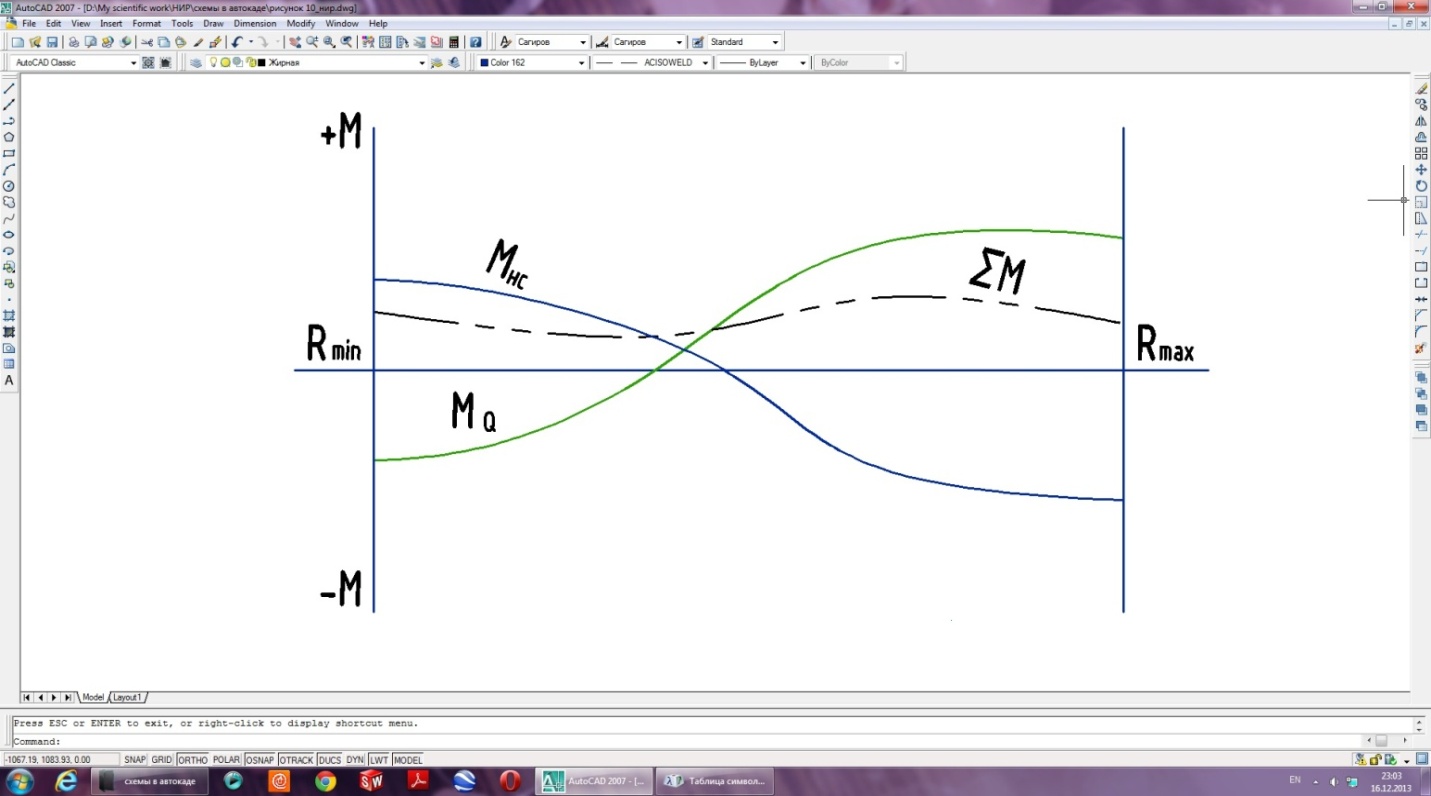
Рис.
4. Графики моментов
Для обеспечения
условий уравновешенности стреловой
системы портального крана необходимо
определить конструктивные параметры
уравновешивающего устройства, значения
которых существенно влияют на общую
компоновку и материалоёмкость крана.
Выделенные на рис. 1 параметры звеньев
(l, m,
d, c)
позволяют выполнить рациональный
автоматизированный синтез за счёт
варьирования их значений.
В процессе
исследования установлено, что наибольшее
влияние на качество уравновешивания
оказывают координаты крепления коромысла
уравновешивающего устройства:
вертикальная l и
горизонтальная m.
Момент противовеса
 зависит от соотношения
зависит от соотношения
 ,
веса противовеса
,
координат переднего плеча коромысла
,
веса противовеса
,
координат переднего плеча коромысла
 ,
,
 :
:
 (4)
(4)
где
 –
расстояние от оси качания стрелы до
точки крепления противовеса,
–
угол раскрытия коромысла,
–
расстояние от оси качания стрелы до
точки крепления противовеса,
–
угол раскрытия коромысла,
 – расстояние по вертикали от оси качания
стрелы до точки крепления противовеса.
– расстояние по вертикали от оси качания
стрелы до точки крепления противовеса.
 (5)
(5)
В результате
экспериментальных исследований
портальных кранов установлено, что
оптимальные значения веса противовеса,
грузового и неуравновешенного моментов
достигаются с использованием
автоматизированного синтеза при
варьировании параметров уравновешивающего
устройства из определенного массива:

На основе обработанных
статистических данных изученных
портальных кранов получены значения
координат крепления коромысла
уравновешивающего устройства и
рассмотрена их взаимосвязь с
неуравновешенным моментом:

Экспериментально
установленные значения параметров l
и m в зависимости от
неуравновешенного момента описываются
разными аналитическими зависимостями,
определение которых выполнено методом
аппроксимации. Поиск аппроксимирующих
функций, максимально приближенных к
экспериментальным данным, осуществлён
посредством программы MS
Excel методом наименьших
квадратов. Используя данный метод,
функции
 были аппроксимированы следующими
зависимостями: многочленом первой
степени –
были аппроксимированы следующими
зависимостями: многочленом первой
степени –
 многочленом второй степени –
многочленом второй степени –
 экспоненциальной
зависимостью –
экспоненциальной
зависимостью –

Результаты расчётов
представлены в табл. 1.
Для определения
функции, которая наилучшим образом
описывает зависимость между параметрами
 и
,
и
,
для каждого вида аппроксимации вычислены
коэффициенты детерминации и коэффициент
корреляции (табл. 2).
и
,
и
,
для каждого вида аппроксимации вычислены
коэффициенты детерминации и коэффициент
корреляции (табл. 2).
Таблица
1
Table
1
Результаты
аппроксимации функций
Results
of functions approximation
|
Вид
аппроксимации
|
Координаты
крепления
|
|
|
l
|
m |
|
Линейная
|

|

|
|
Квадратичная
|
|
|
|
Экспоненциальная
|
|
|
Таблица
2
Table
2
Значения
коэффициентов корреляции
и детерминации
Values of
correlation and determination coefficients
|
Коэффициент
корреляции
|
|
|
|
|
0,96
|
0,93 |
|
Коэффициент
детерминации для линейной аппроксимации
|
0,92
|
0,86
|
|
Коэффициент
детерминации для квадратичной
аппроксимации
|
0,89
|
0,89
|
|
Коэффициент
детерминации для экспоненциальной
аппроксимации
|
0,8
|
0,76
|
Согласно рекомендациям,
содержащимся в работах [2–4],
эмпирическая функция наиболее точно
отражает экспериментальные данные,
если коэффициент детерминации приближенно
равен коэффициенту корреляции.
В результате
исследований установлено, что
зависимость наилучшим
образом описывается линейной функцией
наилучшим
образом описывается линейной функцией
 234l;
а зависимость
234l;
а зависимость
 – квадратичной функцией
– квадратичной функцией
 .
Построены графики (рис. 5–7), которые
отражают характер изменения
неуравновешенного момента при
варьировании значений координат (m,
l).
.
Построены графики (рис. 5–7), которые
отражают характер изменения
неуравновешенного момента при
варьировании значений координат (m,
l).
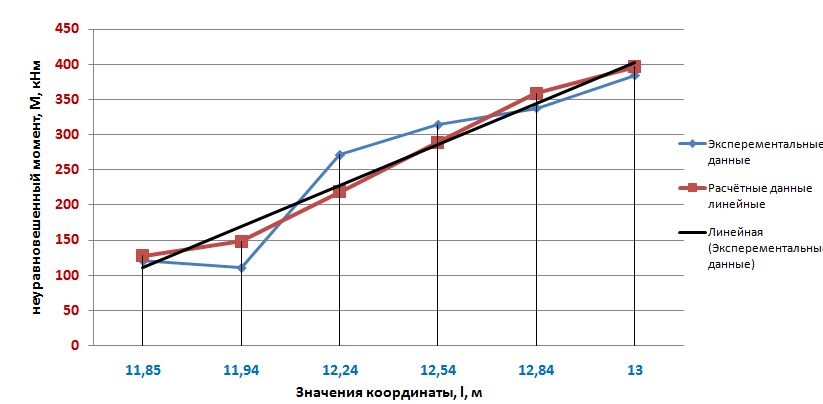
Рис.
5. График линейной
зависимости
Fig.
5. Graph of linear dependence
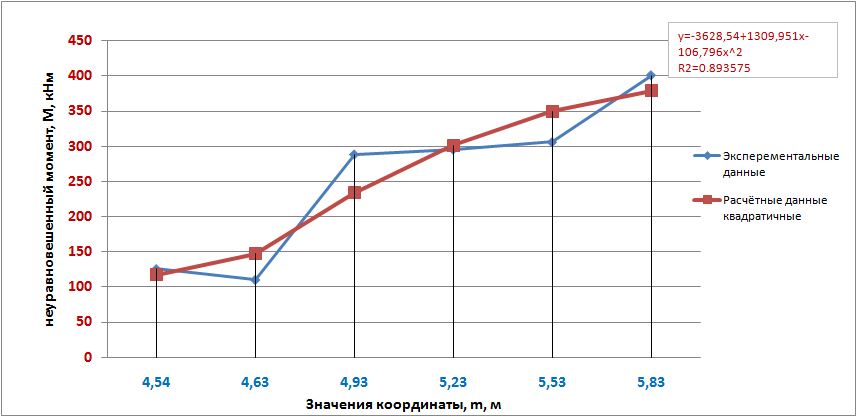
Рис.
6. График квадратичной зависимости
Fig.
6. Graph of
quadratic dependence
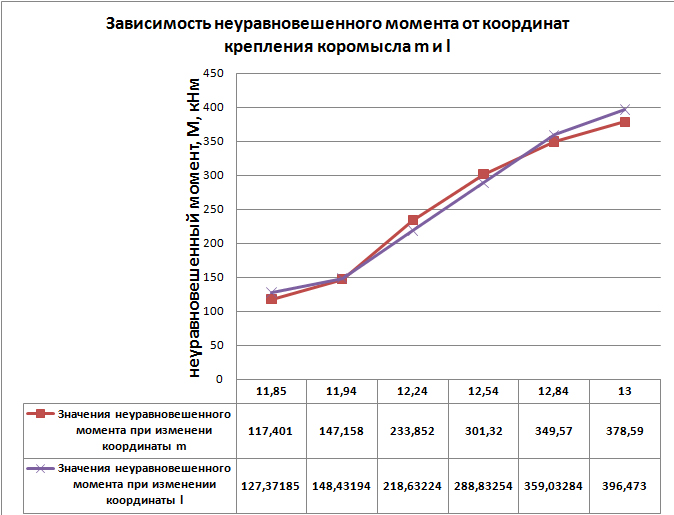
Рис.
7. График зависимости неуравновешенного
момента от координат крепления коромысла
уравновешивающего устройства
Fig.
7. The graph of the dependence of the unbalanced moment on the
coordinates of the mounting
of the beam of the balancing device
Результаты
исследования отражены в работе [15]:
1. Оптимальные
значения названных критериев качества
достигаются при

2. Значения параметров
изменить относительно оптимальных
значений
и
возможно не более, чем на 0,1 м. Дальнейшее
изменение недопустимо по ограничениям
угла захода противовеса и обеспечения
компоновки стреловой системы и системы
уравновешивания.
3. На качество
уравновешивания системы в наибольшей
степени влияет параметр
.
4. Характер изменения
неуравновешенного момента в
оптимизированном варианте ( )
полностью отвечает всем требованиям
к системе уравновешивания.
)
полностью отвечает всем требованиям
к системе уравновешивания.
5. При уменьшении
или увеличении параметров
и
процент неуравновешенности увеличивается,
а неуравновешенный момент принимает
нежелательную направленность.
4. Экспериментальные
исследование адекватности предложенной
методики на компьютерных моделях
портальных кранов. Авторами апробирован
представленный метод определения
массива варьируемых конструктивных
параметров уравновешивающих устройств
применительно к кранам, компоновка
которых обеспечивает собираемость и
подвижность звеньев стреловой системы
и уравновешивающего устройства (табл.
3).
Таблица
3
Table
3
Анализ
варьируемых параметров
уравновешивающего
устройства
Analysis
of variable parameters of the balancing unit
|
Результаты
исследования
|
Модели
портальных кранов
|
|
КПП
16-36-10,5
|
КПП
32-32-10,5
|
КПП
40-34-10,5
|
|
|
|
|
d = 3,27 м;
l = 12,6 м;
m = 5,2 м. |
С помощью метода
определения массива варьируемых
параметров уравновешивающих устройств
портальных кранов проанализировано
качество уравновешенности до и после
использования представленной методики
и автоматизированного синтеза (табл.
4).
Анализ показал
целесообразность использования
представленной методики и рекомендаций
в комплексном оптимизационном синтезе
[16] шарнирно-сочленённых стреловых
систем портальных кранов.
На основании
математических расчётов и компьютерного
моделирования научно обоснована
целесообразность использования
предложенной методики определения
конструктивных параметров уравновешивающих
устройств. Разработанный массив
варьируемых данных позволяет учитывать
характер уравновешивания и оптимизировать
конструкцию уравновешивающих устройств
и стреловых систем портальных кранов.
Таблица
4
Table
4
Анализ
показателей уравновешенности
стреловой
системы портальных кранов
Indicator
analysis of the boom system balance
for portal cranes
|
Показатели
уравновешенности
|
КПП
16-36-10,5
|
|
До
оптимизации
|
После
оптимизации
|
|
Масса
противовеса
|
15,7
т
|
11,09
т
|
|
Неуравновешенность
|
14,5 %
|
2 %
|
|
Неуравновешенный
момент
|
776,24
кН∙м
|
110,64
кН∙м
|
|
Показатели
уравновешенности
|
КПП
32-32-10,5
|
|
До
оптимизации
|
После
оптимизации
|
|
Масса
противовеса
|
23,5
т
|
20,1
т
|
Продолжение
таблицы 4
Continuation
of a table 4
|
Показатели
уравновешенности
|
КПП
16-36-10,5
|
|
До
оптимизации
|
После
оптимизации
|
|
Неуравновешенность
|
7 %
|
2 %
|
|
Неуравновешенный
момент
|
637,29
кН·м
|
446,1
кН∙м
|
|
Показатели
уравновешенности
|
КПП
40-34-10,5
|
|
До
оптимизации
|
После
оптимизации
|
|
Масса
противовеса
|
26,7
т
|
23,5
т
|
|
Неуравновешенность
|
26 %
|
5 %
|
|
Неуравновешенный
момент
|
133,02
кН·м
|
105,65
кН∙м
|
Научная
новизна и практическая значимость
Впервые представлена
методика определения массива варьируемых
данных, которая позволяет сформировать
массив рациональных параметров
уравновешивающих устройств. Разработана
локальная программа для комплексного
оптимизационного синтеза, позволяющая
определять оптимальные соотношения
координат коромысла, при котором
выполняются условия уравновешенности
и качества портального крана.
Представленная
методика расчёта и определения массива
варьируемых конструктивных параметров
может быть внедрена в практику
проектно-конструкторских организаций
для разработок, проектирования новых
и модернизации существующих
уравновешивающих устройств портальных
кранов с шарнирно-сочленёнными стреловыми
системами.
Выводы
В статье рассмотрен
метод определения варьируемых данных
для комплексного оптимизационного
синтеза уравновешивающих устройств.
Разработки выполнены на базе программы
MS Excel.
Авторами выполнен
анализ влияния варьируемых параметров
на общепринятые критерии оценки качества
шарнирно-сочленённой стреловой системы:
неуравновешенность системы, вес
противовеса, показатели грузового и
стрелового неуравновешенных моментов.
Предложенная
методика апробирована при запуске
комплексного оптимизационного синтеза
применительно к кранам, компоновка
которых обеспечивает собираемость и
подвижность звеньев всех систем.
СПИСОК ИСПОЛЬЗОВАННЫХ
ИСТОЧНИКОВ
Васильев,
Ф. П. Методы оптимизации :
в 2 кн. / Ф. П. Васильев. –
Москва : МЦНМО, 2011.
Верховод,
В. П. Использование
программы MathCAD при синтезе
передаточных рычажных механизмов
[Электронный ресурс] /
В. П.
Верховод // Теория механизмов и машин.
– 2011. – № 1
(17), т. 9.
– С. 69–76.
– Режим доступа:
http://tmm.spbstu.ru/17/verkhovod_17.pdf –
Загл. с экрана. – Проверено : 21.06.2018.
Воевода,
А. А. Реализация итерационного метода
наименьших квадратов для оценивания
параметров статических объектов в
среде MathLab /
А. А. Воевода, Г. В. Трошина // Вестн.
Астрахан. гос.
техн. ун-та.
Серия: Управление, вычислительная
техника и информатика. –
2017. – № 1.
– С. 28–36.
doi: 10.24143/2072-9502-2017-1-28-36
Лепшени,
И. Оптимальный синтез устройства
для уравновешивания стреловых систем
портальных кранов / И.
Лепшени, Л. Г. Серлин
// Тр. Ленингр. политехн.
ин-та. – Ленинград, 1975.
– № 347 :
Металлические конструкции кранов.
Исследование конвейеров. –
С. 77–84.
Ловейкин,
В. С. Исследование движущих
сил в механизме изменения вылета
стреловой системы крана / В. С.
Ловейкин, Д. А. Паламарчук // Гірничі,
будівельні, дорожні та меліоративні
машини : зб. наук. пр. / Київ.
нац. ун-т буд-ва і архітектури. – Київ,
2014. – № 84. – С. 39–45.
Ловейкін,
В. С. Режимно-параметрична
оптимізація технічних систем / В.
С. Ловейкін, Ю. О.
Ромасевич // Машинобудування
: зб. наук. пр. / Укр. інж.-пед. акад. –
Харків, 2017. – № 19.
– С. 90–95.
Мисюра,
В. П. Исследование и
оптимальное проектирование
уравновешивающих устройств стреловых
систем портальных кранов :
автореф. дис. … канд. техн. наук : 05.05.05
/ Мисюра Василий Петрович
; Укр. заочн.
политехн. ин-т.
– Харьков, 1980. – 24 с.
Мисюра,
В. П. Оптимальное проектирование
уравновешивающих устройств стреловых
систем портальных кранов /
В. П. Мисюра,
Б. И. Жермунский // Вестник машиностроения.
– 1980. – № 7.
– С. 41–43.
Моделирование
динамического нагружения датчика
ограничителя грузового момента в
шарнирно-сочленённых стреловых системах
портальных кранов с прямолинейным
хоботом / И. В. Бурданов,
Д.
В. Попов, А. Н. Кривонос, В. П. Самусько
// Современные пути развития науки и
образования : материалы
науч.-практ. конф. (Смоленск,
31 июля 2015 г.). –
Смоленск, 2015. – С.
126–129.
Нестеров,
А. А. Технология локальной
разгрузки корневых шарниров стреловых
систем портальных кранов / А.
А. Нестеров //
Підйомно-транспортна техніка.
– 2016. – № 4 (52). – С. 64–71.
Паламарчук,
Д. А. Оптимізація
режимів руху шарнірно-зчленованої
стрілової системи крана з горизонтальним
переміщенням вантажу : автореф. дис. …
канд. техн. наук : 05.05.05 / Паламарчук
Дмитро Анатолійович ; Київ.
нац. ун-т будівництва і архітектури. –
Київ, 2013. – 25 с.
Петухов,
П. З. Специальные краны / П. З. Петухов,
Г. П. Ксюнин, Л. Г. Серлин. – Москва
: Машиностроение, 1985.
– 248 с.
Справочник
по кранам : в 2 т. /
под общ. ред. М. М. Гохберга.
– Ленинград :
Машиностроение, 1988. – Т.
2. – 559 с.
Суглобов,
В. В. Определение конструктивных
параметров шарнирно-сочленённых
стреловых систем портальных кранов /
В. В. Суглобов, Е. В. Ткачук // Наука та
прогрес транспорту. – 2017.
– № 1 (67).
– С. 156–166. doi:
10.15802/stp2017/92618
Суглобов,
В. В. Оптимізація конструкції
стрілових систем і пристроїв врівноваження
портальних кранів / В.
В. Суглобов, В. А. Міхєєв, К. В. Ткачук
// Университетская наука –
2014 : в 5 т. :
тез. докл.
междунар. науч.-техн.
конф. (Мариуполь, 20–21
мая 2014 г.). – Мариуполь,
2014. – Т.
3. – С. 67–68.
Ткачук,
К. В. Обґрунтування
раціональних конструктивних параметрів
шарнірно-зчленованих стрілових систем
портальних кранів : автореф.
дис. … канд. техн. наук : 05.05.05 / Ткачук
Катерина Володимирівна ;
Укр. інж.-пед.
акад. – Харків,
2017. – 23 с.
Clarke,
F. Functional Analysis, Calculus of Variations and Optimal Control
/ F. Clarke. – London :
Springer, 2013. – 591
p. doi: 10.1007/978-1-4471-4820-3
Keqin,
L. Inverse Design of a New Double-link Luffing Mechanism and
Realization on MATLAB / L. Keqin, J. Cuxiang // Proc. of the 3rd
ICMEM Intern. Conf. on Mechanical Engineering and Mechanics
(21.10–23.10.2009). – Beijing, China,
2009. – Р.
301–304.
Kolonic,
F. Tensor Product Model Transformation-based Controller Design for
Gantry Crane Control System – An Application Approach / F.
Kolonic, A. Poljugan, I. Petrovic // Acta Polytechnica Hungarica. –
2006. – Vol. 3, No. 4. – Р. 95–112.
Mauri,
K. Intelligent container posirioning helps [Электронный
ресурс] / K. Mauri //
Konecranes Magazine. – 2012. – № 1. – Р.
22–27. – Режим доступа:
http://www.konecranes.com/sites/default/files/download/sagt.pdf
– Загл. с
экрана. – Проверено
: 21.06.2018.
Seeler,
K. A. System dynamics: an introduction for mechanical engineers /
K. A. Seeler. – New York : Springer, 2014. – 667 p. doi:
10.1007/978-1-4614-9152-1
Vulfson,
I. Dynamics of cyclic machines / І.
Vulfson. –
Cham : Springer
Publ., 2015. – 390
p.
doi: 10.1007/978-3-319-12634-0
В. В. СУГЛОБОВ1*, С. В. РАКША2,
К. В. ТКАЧУК3
1*Каф.
«Підйомно-транспортні машини і деталі
машин», ДВНЗ «Приазовський державний
технічний університет», вул.
Університетська, 7, Маріуполь, Україна,
87500, тел. +38 (067) 623 12 69, ел. пошта
suglobov_v_v@ukr.net, ORCID 0000-0003-1743-0894
2Каф.
«Прикладна механіка та матеріалознавство»,
Дніпропетровський
національний університет залізничного
транспорту імені академіка В. Лазаряна,
вул. Лазаряна, 2, Дніпро, Україна, 49010,
тел. +38 (067) 634 17 46,
ел. пошта raksha@ukr.net,
ORCID 0000-0002-4118-1341
3Каф.
«Підйомно-транспортні машини і деталі
машин», ДВНЗ «Приазовський державний
технічний університет», вул.
Університетська, 7, Маріуполь, Україна,
тел. +38 (066) 149 23 49, ел. пошта
ev13tk@gmail.com, ORCID
0000-0002-0309-1644
ВИЗНАЧЕННЯ
ВАРІЙОВНИХ КОНСТРУКТИВНИХ
ПАРАМЕТРІВ зрівноважувальних
ПРИСТРОЇВ ПОРТАЛЬНИХ
КРАНІВ
Мета.
Дослідження виконане з метою вдосконалення
процесу проектування зрівноважувального
пристрою портального крана. Для її
досягнення необхідно: 1) скласти динамічну
й математичну моделі, які дозволяють
описати рух зрівноважувального пристрою
та стрілової системи портального крана
в разі зміни вильоту; 2) запропонувати
засіб визначення та методику розрахунку
масиву варійовних параметрів конструкції
зрівноважувальних пристроїв; 3)
розрахувати оптимальне співвідношення
координат кріплення коромисла
зрівноважувального пристрою та вивчити
їх вплив на неврівноваженість стрілової
системи портального крана. Методика.
Для визначення
кінематичних характеристик ланок
зрівноважувального пристрою розроблені
динамічна й математична моделі, які
дозволяють описати рух противаги з
коромислом за умови зміни вильоту
стріли. Задача врівноваження стрілових
систем портальних кранів зводиться до
визначення конструктивних параметрів
зрівноважувального пристрою, який
забезпечував би врівноваження стрілової
системи на всьому діапазоні вильотів.
Також розроблена методика визначення
прийнятних варійовних конструктивних
параметрів зрівноважувальних пристроїв
із урахуванням умов рухомості, збираності
та вимог до значень неврівноваженого
стрілового моменту. Результати.
За допомогою математичного
моделювання науково обґрунтована
доцільність використання запропонованої
методики визначення конструктивних
параметрів зрівноважувальних пристроїв.
Розроблений масив варійовних даних
дозволяє враховувати характер
врівноваження й оптимізувати конструкцію
зрівноважувальних
пристроїв стрілових систем портальних
кранів. Авторами проведений аналіз
впливу варійовних параметрів на
загальноприйняті критерії оцінки
якості шарнірно-зчленованої стрілової
системи: неврівноваженість системи,
вага противаги, показники вантажного
й стрілового неврівноважених моментів.
Наукова новизна. Уперше
запропонована методика визначення
масиву варійовних даних, яка дозволяє
отримати раціональні конструктивні
параметри зрівноважувальних пристроїв
портальних кранів. Розроблена локальна
програма для комплексного оптимізаційного
синтезу, що дозволяє визначати оптимальні
співвідношення координат коромисла,
за яких виконуються умови врівноваженості
та якості портального крана. Практична
значимість. Запропонована
методика визначення масиву варійовних
конструктивних параметрів може бути
використана під час проектування нових
і модернізації наявних зрівноважувальних
пристроїв портальних кранів із
шарнірно-зчленованими стріловими
системами, що дозволить знизити
матеріалоємність стрілової системи й
енергоспоживання кранів. За допомогою
комп’ютерного моделювання виконана
апробація запропонованої методики
стосовно кранів, компонування яких
забезпечує збираність і рухомість
ланок усіх систем.
Ключові слова:
портальний кран;
зрівноважувальний пристрій;
шарнірно-зчленована стрілова система;
синтез; конструктивні параметри;
коромисло; неврівноважений момент
V. V. SUGLOBOV1*,
S. V. RAKSHA2,
K. V. TKACHUK3
1*Dep.
«Handling Equipment and Details of Machines», Pryazovskyi
State Technical University,Universytetska St.,7, Mariupol, Ukraine,
87500,
tel. +38 (067) 623 12 69,
e-mail suglobov_v_v@ukr.net, ORCID 0000-0003-1743-0894
2Dep.
«Applied Mechanics and Materials Science»,
Dnipropetrovsk
National University of Railway Transport named after Academician V.
Lazaryan, Lazaryan
St., 2, Dnipro, Ukraine, 49010,
tel. +38 (067) 634 17 46, e-mail
raksha@ukr.net,
ORCID 0000-0002-4118-1341
3«Handling
Equipment and Details of Machines», Pryazovskyi
State Technical University, Universytetska St.,7, Mariupol, Ukraine,
87500,
tel. +38
(066) 149 23 49, e-mail ev13tk@gmail.com,
ORCID 0000-0002-0309-1644
DETERMINATION OF THE VARIED CONSTRUCTIVE PARAMETERS
for BALANCING units OF PORTAL CRANES
Purpose. The research was carried out to improve
the design process of the balancing unit for portal crane. In order
to achieve the purpose one should: 1) to develop a dynamic and
mathematical model that allows describing the movement of balancing
unit and the boom system of portal crane, when derricking; 2) to
propose the way for determining and the methodology for calculating
the array of variable design parameters of balancing units; 3) to
calculate the optimal ratio of the beam mounting coordinates for
balancing units and to study their influence on the imbalance of the
portal crane boom system. Methodology. To determine the
kinematic characteristics of the balancing unit links, dynamic and
mathematical models, describing the movement of balance beam with
counterweight when derricking, have been developed. The task of
balancing boom systems of portal cranes is reduced to determining
the design parameters of the device, which would provide balancing
of the boom system on the entire range of derricking. It was also
developed a methodology for calculating the acceptable varying
design parameters of balancing units, taking into account the
conditions of mobility, assemblability and the requirements for the
values of unbalanced boom torque. Findings. Based on
mathematical calculations and computer simulation the expediency of
using the proposed methodology for determining the design parameters
of balancing units has been scientifically substantiated. The
developed array of variable data makes it possible to take into
account the nature of balancing and optimize the design of
counterbalancing devices and boom systems for portal cranes. The
authors analyzed the influence of variable parameters on the
generally accepted criteria for assessing the quality of the
articulated boom system: the system's unbalance, the weight of
counterweight, the indices of load and boom unbalanced moments.
Originality. For the first time, a methodology for
determining an array of variable data has been proposed. It makes it
possible to form the array of rational design parameters of
balancing units. It was developed a local program for complex
optimization synthesis, which makes it possible to determine the
optimum ratios of the balance beam coordinates, under which the
conditions of balance and quality of the portal crane are satisfied.
Practical value. The proposed methodology for determining the
array of varying design parameters can be used in the development
organizations for designing new and retrofitting the existing
balancing units for portal cranes with articulated boom systems. The
proposed methodology was tested at the launch of complex
optimization synthesis with respect to cranes, the configuration of
which ensures assemblability and mobility of the links of all
systems.
Keywords: portal crane; balancing units;
articulated boom system; synthesis; design parameters; balance beam;
unbalanced moment
REFERENCES
Vasilev, F. P. (2011). Metody
optimizatsii (Vol. 1-2). Moscow:
MCNMO. (in
Russian)
Verkhovod,
V. P. (2011). Ispolzovanie
programmy MathCAD pri sinteze peredatochnykh rychazhnykh
mekhanizmov. Teoriya
mekhanizmov i mashin, 1(9),
69-76. Retrieved
from
http://tmm.spbstu.ru/17/verkhovod_17.pdf
(in
Russian)
Voevoda,
A. A.,
& Troshina,
G. V. (2017).
The realization of the iterative method of the least squares for
the estimation of static object parameters in Matlab environment.
Vestnik
of
Astrakhan State Technical University. Series: Management, Computer
Sciences and Informatics,
1, 28-36.
doi: 10.24143/2072-9502-2017-1-28-36
(in
Russian)
Lepsheni,
I., &
Serlin, L. G. (1975). Optimalnyy sintez ustroystva dlya
uravnoveshivaniya strelovykh sistem portalnykh kranov. Trudy
Leningradskogo politekhnicheskogo instituta: Metallicheskie
konstruktsii kranov. Issledovanie konveyerov, 347,
77-84. (in
Russian)
Loveykin,
V. S., &
Palamarchuk, D. A. (2014). The driving forces research in mechanism
luffing of boom system. Mining,
Construction, Road and Reclamation Machines, 84,
39-45. (in
Russian)
Loveikin,
V. S., & Romasevych,
Y. O. (2017).
Rezhymno-parametrychna optymizatsiia tekhnichnykh system.
Mashynobuduvannia,
19, 90-95.
(in
Ukranian)
Misyura,
V. P.
(1980). Issledovanie
i
optimalnoe
proektirovanie
uravnoveshivayushchikh
ustroystv
strelovykh
sistem
portalnykh
kranov.
(Avtoreferat
dissertatsii kandidata
tekhnicheskikh
nauk). Ukrainskiy
zaochnyy
politekhnicheskiy
institute, Kharkov. (in
Russian)
Misyura,
V. P., & Zhermunskiy, B. I. (1980). Optimalnoe proektirovanie
uravnoveshivayushchikh ustroystv strelovykh sistem por-talnykh
kranov. Vestnik mashinostroeniya, 7,
41-43. (in
Russian)
Burdanov,
I. V., Popov, D. V., Krivonos, A. N., & Samusko, V. P. (2015).
Modelirovanie dinamicheskogo nagruzheniya datchika ogranichitelya
gruzovogo momenta v sharnirno-sochlenennykh strelovykh sistemakh
portalnykh kranov s pryamolineynym khobotom. Sovremennye
puti razvitiya nauki i obrazovaniya: materialy
nauchno-prakticheskoy konferentsii (Smolensk, July 31, 2015)
Smolensk, 126-129.
(in
Russian)
Nesterov,
A. A. (2016). Tekhnologiya lokalnoy razgruzki kornevykh sharnirov
strelovykh sistem portalnykh kranov. Hebezeuge
und Fördermittel,
4(52),
64-71.
Retrieved from
http://ptt-journals.net/wp-content/uploads/2016/12/Pidtt-2016-4-9.pdf
(in
Russian)
Palamarchuk,
D. A.
(2013). Optymizatsiia
rezhymiv
rukhu
sharnirno-zchlenovanoi
strilovoi
systemy
krana
z
horyzon-talnym
peremishchenniam
vantazhu.
(Avtoreferat dysertatsii kandydata tekhnichnykh
nauk). Kyivskyi
natsionalnyi universytet
budivnytstva i
arkhitektury,
Kyiv. (in
Ukranian)
Petukhov,
P. Z., Ksyunin, G. P., & Serlin, L.
G. (1985). Spetsialnye krany.
Moskow:
Mashinostroenie. (in
Russian)
Gokhberg,
M. M. (Ed). (1988). Spravochnik po
kranam (Vol.
1-2). Leningrad: Mashinostroenie.
(in
Russian)
Suglobov,
V. V., & Tkachuk,
K. V. (2017).
Determination of design parameters
determination of design parameters
of articulated jib systems of
portal crane. Science
and Transport Progress, 1(67),
156-166.
doi:
10.15802/stp2017/92618 (in
Russian)
Suhlobov,
V. V., Mikhieiev, V. A., & Tkachuk, K. V. (2014). Optymizatsiia
konstruktsii strilovykh system i prystroiv vrivnovazhennia
portalnykh kraniv. Universitetskaya
nauka (Vol. 1-5):
tezisy dokladov mezh-dunarodnoy nauchno-tekhnicheskoy konferentsii
(Mariupol, 20–21 May 2014) Mariupol,
67-68. (in Ukranian)
Tkachuk,
K. V.
(2017).
Obgruntuvannia
ratsionalnykh
konstruktyvnykh
parametriv
sharnirno-zchlenovanykh
strilovykh
system
portalnykh
kraniv.
(Avtoreferat dysertatsii kandydata tekhnichnykh nauk). Ukrainian
engineering pedagogics academy, Kharkiv.
(in Ukranian)
Clarke,
F. (2013). Functional
Analysis, Calculus of Variations and Optimal Control.
New York: Springer Publisher.
doi: 10.1007/978-1-4471-4820-3 (in English)
Keqin,
L., & Cuxiang J. (2009). Inverse Design of a New Double-link
Luffing Mechanism and Realization on MATLAB. Proceedings
of the 3rd ICMEM International Conference on Mechanical Engineering
and Mechanics (October 21-23, 2009)
Beijing, P. R. China, 301-304.
(in English)
Kolonic,
F., Poljugan,
A., &
Petrovic,
I. (2006).
Tensor Product Model Transformation-based
Controller Design for Gantry Crane Control System – An
Application Approach. Acta
Polytechnica Hungarica,
3, 4,
95-112.
(in English)
Mauri,
K., (2012).
Intelligent container posirioning helps.
Konecranes Magazine, 1,
22-27.
Retrieved from
http://www.konecranes.com/sites/default/files/download/sagt.pdf
(in English)
Seeler,
K. A. (2014).
System dynamics: an introduction for
mechanical engineers.
New York: Springer Publisher.
doi: 10.1007/978-1-4614-9152-1 (in
English)
Vulfson,
I. (2015). Dynamics of cyclic
machines.
Cham:
Springer Publisher. doi: 10.1007/978-3-319-12634-0
(in English)
Поступила
в редколлегию: 10.04.2018
Принята к печати:
20.07.2018
doi 10.15802/stp2018/140555 ©
В. В. Суглобов, С. В. Ракша, Е. В. Ткачук,
2018