ISSN
2307–3489 (Print), ІSSN
2307–6666
(Online)
Наука
та прогрес транспорту. Вісник
Дніпропетровського
національного університету залізничного
транспорту, 2018,
№ 1 (73)
МОДЕЛЮВАННЯ
ЗАДАЧ ТРАНСПОРТУ ТА ЕКОНОМІКИ
МОДЕЛЮВАННЯ
ЗАДАЧ ТРАНСПОРТУ ТА ЕКоНОМІКИ
УДК
629.421.5:004.94
І.
А. КЛЮШНИК1*
1*Каф.
«Електронні обчислювальні машини»,
Дніпропетровський національний
університет залізничного транспорту
імені академіка В. Лазаряна,
вул. Лазаряна,
2, Дніпро, Україна, 49010, тел. +38 (056) 373 15 89,
ел. пошта klugran@i.ua, ORCID 0000-0001-9939-0755
ДОСЛІДЖЕННЯ
РАЦІОНАЛЬНИХ ХАРАКТЕРИСТИК
КАНАЛІВ
ПЕРЕДАЧІ ДАНИХ ІНФОРМАЦІЙНО-
ВИМІРЮВАЛЬНОЇ
СИСТЕМИ
Мета.
Стаття ставить за мету визначення
раціональних параметрів інтерфейсів
передачі даних інформаційно-вимірювальної
системи випробувань гідравлічних
передач тепловозів, а також знаходження
ступеня відмовостійкості в різних
режимах роботи системи. Методика.
У роботі дослідником були визначені та
теоретично розраховані основні
характеристики каналів передачі даних
від апаратних перетворювачів сигналів
аналогових датчиків технологічних
параметрів до комп’ютера. Для більш
повної оцінки в середовищі MATLAB було
створено імітаційну модель у рамках
дослідження поставленої задачі. Аналіз
результатів теоретичних розрахунків
та показників, отриманих за допомогою
імітаційної моделі з метою визначення
раціональних налаштувань інтерфейсів
(швидкості передачі, елементної бази,
структури системи тощо) передачі даних,
дозволяє визначити необхідні характеристики
системи. Результати.
Для існуючої інформаційно-вимірювальної
системи випробувань гідравлічних
передач тепловозів були проведені
дослідження з метою визначення та
розрахунку основних характеристик
каналів передачі даних від апаратних
перетворювачів сигналів аналогових
датчиків технологічних параметрів до
комп’ютера. Для дослідження тахометричної
підсистеми було створено імітаційну
модель, яка дозволила дослідити основні
характеристики каналів передачі даних
від апаратних перетворювачів сигналів
аналогових датчиків тахометричних
параметрів до комп’ютера. Був проведений
аналіз даних, отриманих за результатами
теоретичних розрахунків і за допомогою
імітаційної моделі, та визначені шляхи
раціонального налаштування їх передачі.
Наукова новизна.
Дослідження та теоретичні розрахунки
основних характеристик каналів передачі
даних від апаратних перетворювачів
сигналів аналогових датчиків до
комп’ютера показали, що система працює
у режимі фактичної «відмови від
обслуговування». Для більш детальних
досліджень процесів, що протікають у
системі передачі тахометричних даних,
у середовищі MATLAB була створена імітаційна
модель, яка дозволила провести ряд
експериментів. Практична
значимість. На основі
експериментів із моделлю були встановлені
раціональні шляхи розв’язання існуючої
проблеми: роботи системи в режимі
фактичної «відмови від обслуговування».
Також впровадження одного із запропонованих
способів вирішення проблеми або їх
комбінування потребують подальших
досліджень у реальній системі.
Ключові
слова: імітаційна модель; MATLAB; SIMULINK;
гідравлічна передача; випробування
гідропередач; випробувальний стенд;
інформаційно-вимірювальна система
Вступ
Більшості
локомотивів із гідравлічною передачею
потужності, які використовуються на
території України, необхідно проведення
капітального або капітально-відновлюваного
ремонту. При виконанні капітального
ремонту одним із складних і відповідальних
вузлів тепловоза є гідравлічна передача.
Після капітальних ремонтів гідравлічних
передач тепловозів проводяться їх
випробовування без навантаження з
метою припрацювання деталей, а також
випробування під навантаженням із
метою перевірки основних параметрів.
За технічними умовами підприємств, що
ремонтують гідравлічні передачі,
рекомендується проведення певного
обсягу оціночних і регулювальних
випробувань гідравлічних передач
тепловозів із метою контролю їх
післяремонтного стану. Згідно з правилами
ремонту в процесі обкатки гідравлічних
передач тепловозів без навантаження
та з навантаженням в основному
контролюється рівень шуму, герметичність,
температурні режими, тиск у масляних
системах, розгін турбінного валу,
спрацювання блокувальних пристроїв,
вмикання муфт реверсу і режимів, величина
вібрації корпусу, надійність і чіткість
роботи системи автоматичного управління
[5].
В Україні сьогодні
для виконання заводських випробувань
гідравлічних передач тепловозів
використовуються типові стенди, які
не в повній мірі відповідають сучасним
вимогам до випробувань. Звичайно, дані
стенди за кількістю контрольних
параметрів і точністю вимірювання (у
переважній більшості застосовуються
стрілочні аналогові індикатори) не
відповідають сучасному рівню розвитку
обчислювальної техніки, а саме: не
дозволяють фіксувати динаміку процесів.
Відсутність автоматичної фіксації
виміряних параметрів та протоколу
випробувань зменшує можливості аналізу
результатів випробувань і випробувальних
стендів у цілому.
Для отримання більш
повної інформації про технічний стан
гідравлічної передачі під час випробувань
необхідно застосовувати нові методи
та засоби випробувань. Відповідно до
вимог розробленої методики при визначенні
механічних втрат у гідравлічних
передачах під час стендових випробувань
[3] необхідно забезпечити високу точність
вимірювання частоти обертання турбінного
колеса гідравлічної передачі.
Мета
Проведені дослідження
ставили за мету визначити раціональні
параметри інтерфейсів передачі даних
інформаційно-вимірювальної системи
випробувань гідравлічних передач, а
також визначити ступінь відмовостійкості
в різних режимах роботи системи.
Для досягнення
поставленої мети вирішувалися наступні
задачі:
– визначення
та розрахунок основних характеристик
каналів передачі даних від апаратних
перетворювачів даних сигналів аналогових
датчиків технологічних параметрів до
комп’ютера;
– створення
імітаційної моделі для дослідження
основних характеристик каналів передачі
даних від апаратних перетворювачів
даних сигналів аналогових датчиків
технологічних параметрів до комп’ютера;
– аналіз
отриманих за результатами теоретичних
розрахунків та за допомогою імітаційної
моделі даних із метою визначення
раціональних налаштувань інтерфейсів
(швидкості передачі, елементної бази,
структури системи тощо) передачі даних.
Методика
Спрощена схема
інформаційних потоків даних
інформаційно-вимірювальної системи
випробувань гідравлічних передач
тепловозів показана на рис. 1.
Як видно з рис. 1 та
за [5], система опрацьовує інформацію
від трьох датчиків частоти обертання,
які обробляють три мікроконтролери
ATMEGA 8, що послідовно передають по ланцюжку
за допомогою інтерфейсу UART розрахункові
дані частоти обертів, отримані на основі
сигналу від відповідних датчиків
частоти обертання. Для передачі даних
до комп’ютера останній (третій в
ланцюжку) мікроконтролер передає
послідовно як свої дані виміряної
частоти обертів, так і дані інших двох
єдиним пакетом даних за допомогою
перетворювача з UART на USB FT232RL.
Дані інших десяти
параметрів (температура масла в колі
циркуляції першого та другого
гідротрансформаторів, температура
масла до та після гідропередачі, тиск
масла в колі циркуляції першого та
другого гідротрансформаторів, струм
та напруга приводного електродвигуна
та навантажувального генератора)
обробляються за допомогою індикаторів
технологічних параметрів «МикРА И3»
(для температури, струму, напруги) та
«МикРА И4» (для тиску), які передаються
по загальній шині на базі RS-485 за допомогою
протоколу канального рівня MODBUS RTU.

Рис. 1. Спрощена
схема інформаційних потоків даних
інформаційно-вимірювальної системи
випробувань гідравлічних передач
тепловозів
Fig. 1. Simplified
scheme of information data flows of information-measurement system
for tests
of locomotive hydraulic gears
Протокол MODBUS RTU [8]
потребує значних часових затримок (до
1,75 мс міжкадрові затримки та до 9 байт
в кожному кадрі), також для отримання
даних потрібно відправити кадр-запит
та отримати кадр-відповідь від
відповідного пристрою. Самими
швидкоплинними процесами в системі є
перехідні процеси струму та напруги
на двигуні та генераторі. Як показують
дослідження [4], спектр перехідного
процесу містить максимальну частоту
1,22 Гц. Для того, щоб відтворити такий
сигнал за теоремою Найквіста-Котельникова,
необхідно вести опитування датчиків
із вдвічі більшою частотою, тобто 2,4
Гц. Для забезпечення повного відтворення
струмів і напруг, а також інших параметрів,
що обробляються за допомогою індикаторів
технологічних параметрів (адже інші
параметри не можуть змінитися швидше,
ніж струм або напруга на двигуні), цілком
достатньо застосовувати протокол
MODBUS RTU з використовуваною швидкістю
передачі даних у 9 600 бод, що дозволить
вести фіксацію даних від 10 датчиків із
частою близько 14 Гц.
Як свідчать
дослідження [1] в заводських
умовах (подібних до тепловозоремонтного
заводу), можуть виникати електромагнітні
завади в діапазоні від 600 до 1 200
кГц. Тому вплив на спотворення даних
при передачі мінімальний, адже на таких
високих частотах дані не фіксуються
системою. І навіть при надходженні
спотворених даних – такі дані будуть
проігноровані, оскільки CRC – сума такого
кадру даних – буде неправильною. Також
такі перешкоди носять не постійний
характер, оскільки здебільшого в умовах
заводу постійно проходять перехідні
процеси, які пов’язані з вмиканням
різних потужних споживачів.
З точки зору передачі
даних виміряних десяти параметрів
(температури масла в колі циркуляції
першого та другого гідротрансформаторів,
температури масла до та після
гідропередачі, тиску масла в колі
циркуляції першого та другого
гідротрансформаторів, струму та напруги
приводного електродвигуна та
навантажувального генератора) –
передача їх за допомогою «МикРА И3»
(для температури, струму, напруги) та
«МикРА И4» (для тиску) і передачі їх до
комп’ютера за допомогою перетворювача
з RS-485 на USB FT232RL є досить надійними – з
точки зору завантаження середовища
передачі даних (завдяки застосуванню
протоколу MODBUS RTU) [8], та мають раціональну
частоту опитування, що значно перевищує
розрахункову. Тому подальший розрахунок
та вибір оптимальних параметрів у
даному випадку – недоцільний, адже
через затримки при передачі даних по
протоколу MODBUS RTU, а також одночасну
роботу лише з одним екземпляром «МикРА
И3» або «МикРА И4» будь-які можливі
колізії у системі зводяться практично
до нуля.
Тому
розглянуто більш детально характеристики
каналів передачі даних від апаратних
перетворювачів (мікроконтролерів)
даних сигналів аналогових датчиків
технологічних параметрів (тахометричних)
до комп’ютера. Програми усіх трьох
мікроконтролерів виконують передачу
зі швидкістю 9 600 бод. Мікроконтролери
мають буфери приймачів UART, рівні 2
байтам. Мікросхема-перетворювач FT232RL
має буфер приймача, рівний 128 байт. Дані
в ланцюжках передаються в мікроконтролерах
одразу після надходження або після
завершення вимірювання відповідним
мікронтролером. Тому затримки при
прийомі, формуванні нових даних і
відправці практично досить невеликі,
ними можна знехтувати, якщо вони
досягають не більше 90 мкс (при максимальних
обертах 1 500 хв-1
розбіжність буде
складати приблизно 20 хв-1,
тобто в рамках статистичної похибки,
яка була розрахована в [10]).
Оскільки самим слабким місцем системи
(найбільш навантаженим) буде передача
даних із третього мікроконтролера до
мікросхеми-перетворювача FT232RL, то було
виконано розрахунок часу передачі
даних від цього мікроконтролера та
частоти формування імпульсів від
датчика. Були прийняті такі допущення:
-мікроконтролер
передає дані зі швидкостями 9 600,
19 200, 38 400,
115 200,
250 000, 1 000 000 бод;
– виконується
розрахунок у разі надходження сигналу
від оптичного датчика на 10 зубців за
формулою:
 , (1)
, (1)
де, τ
– період сигналу, с ; ω – виміряна
частота обертання, хв-1;
N
– кількість зубців диска датчика;
– виконується
розрахунок у разі надходження сигналу
від тахогенератора змінного струму
і/або оптичного фотодатчика за час
повного обертання датчика на 10 зубців
за формулою:
 , (2)
, (2)
– виміряні
дані передаються двома байтами від
кожного мікроконтролера, а на початку
і в кінці передачі подаються з метою
синхронізації по одному службовому
байту відповідно (тобто виконується
передача посилок даних (кадрів), які
рівні 8 байтам);
– максимальна
частота обертання становить 1 500
хв-1;
– у разі
відсутності нових даних на момент
відправки замість них відправляється
два службові байти-пустушки.
– структура
кадра наступна: початковий службовий
байт, 2 байти даних від першого датчика
або два службові байти-пустушки, два
байти даних від другого датчика або
два службові байти-пустушки, два байти
даних від третього датчика або два
службові байти-пустушки.
Звичайно,
можливо оцінити можливість передачі
повного кадру даних при різних швидкостях
передачі даних та алгоритмах обробки
при умові, що максимально можлива
частота обертання – 1 500 хв-1
. Беручи до уваги
формулу (1), можна отримати наступну
формулу:
 , (3)
, (3)
де P –
кількість переданих кадрів; К – кількість
байт у кадрі; Vп
–
швидкість передачі, бод.
Аналогічним чином,
використовуючи формулу (2), можна
отримати:
 , (4)
, (4)
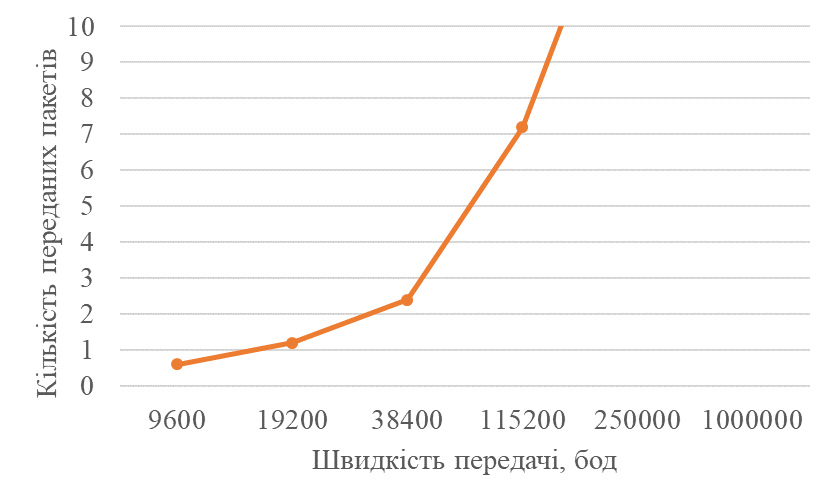
Рис.
2. Залежність кількості переданих
пакетів даних (розміром швидкості у 8
байт)
за 1/10 обертання валу при швидкості
1 500 хв-1
Fig. 2. Dependence
of number of transmitted data packets (speed size of 8 bytes)
for
1/10 shaft rotation at a speed of 1 500 min-1
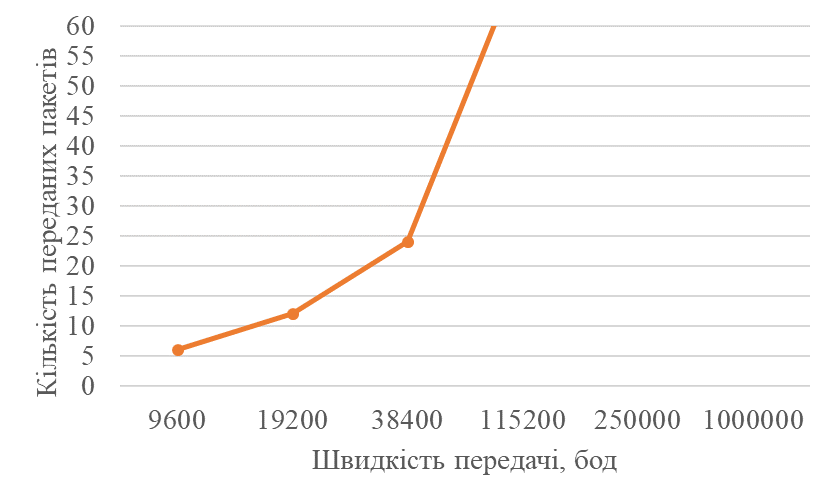
Рис.
3. Залежність кількості переданих
пакетів даних (розміром швидкості у 8
байт)
за повне обертання валу при
швидкості 1 500
хв-1
Fig. 3. Dependence
of number of transmitted data packets (speed size of 8 bytes)
for
full shaft rotation at a speed of 1 500 min-1
Як видно з рис. 2,
при алгоритмі обробки даних від датчика
за 1/10 обертання поточної швидкості
9 600 бод явно недостатньо для передачі
кадру даних від усіх трьох датчиків за
умов максимальної частоти обертання.
Схожа тенденція також демонструється
на рис. 3 (на якому показано кількість
переданих пакетів даних за один оберт
валу при максимальній швидкості). Але
в даному випадку можливо передати до
5 кадрів, що є цілком достатнім для
роботи системи.
Для більш повного
дослідження процесів у підсистемі
вимірювання частот обертання була
створена імітаційна модель в середовищі
MATLAB SIMULINK із застосуванням SimEvents.
Дана
модель виконує розрахунок за алгоритмом,
запропонованим автором у [9]. У даному
алгоритмі час обертання зі швидкістю
до 80 хв-1 складає
величну, яку можливо розрахувати за
формулою (2), а для швидкості, що перевищує
80 хв-1 –
за формулою (1). Час опитування FT232RL
дорівнює 0,4 с.
Структурно модель
показано на рис. 4.

Рис.
4. Структурна схема СМО в середовищі
MATLAB
Fig.
4. Structural diagram
of queue system
(QS) in
MATLAB environment
Було
проведено серію експериментів при
максимальній швидкості 1 500 хв-1
та різних (які підтримуються як
приймачами, так і передавачами)
швидкостях: від 9 600 до 1 000 000 бод,
при варіаціях часу опитування
мікросхеми-перетворювача FT232RL (від 0,4
до 0,1 с), а також за умов розрахунку
частоти обертання за 1/10 обертання на
всіх валах і за умов розрахунку частоти
обертання за одне повне обертання на
всіх валах. Основний критерій оцінки
– середня довжина черги (занятість
буфера FT232RL).
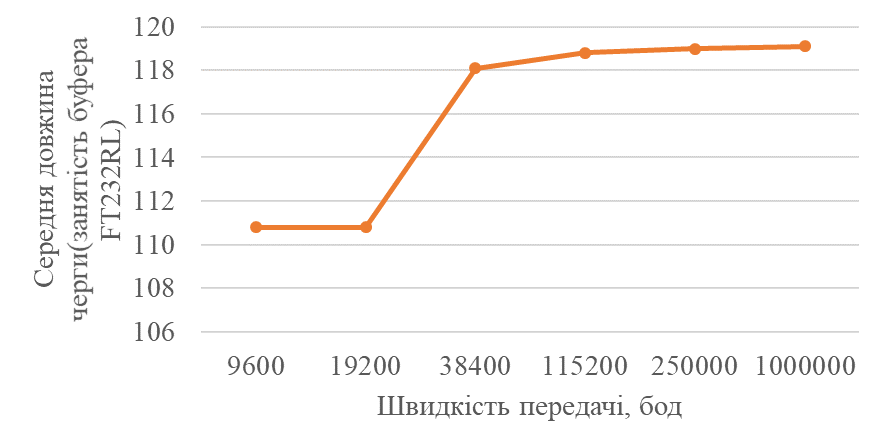
Рис.
5. Залежність середньої довжини черги
від швидкості передачі за 1/10
обертання
всіх валів при частоті обертання
1 500хв-1,
при часі опитування FT232RL
0,4 с.
Fig. 5.
Dependence of the average queue length on the transmission speed for
1/10 rotation
of all shafts at a rotational speed of 1
500 min.-1 at the
polling time of FT232RL 0.4 sec.
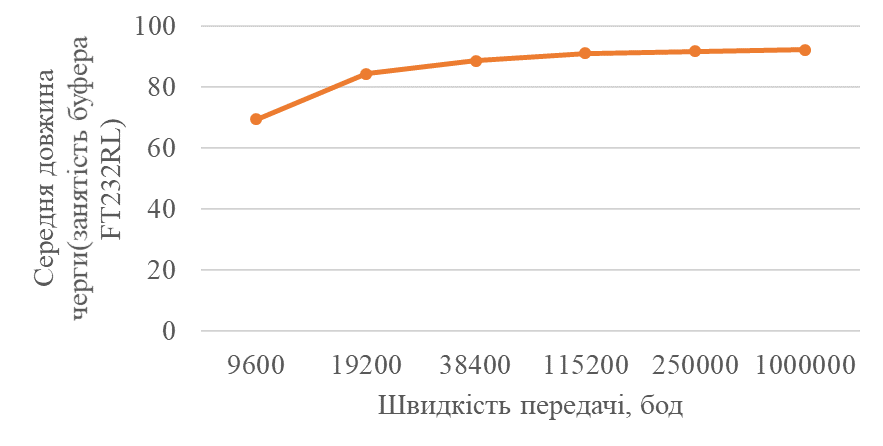
Рис.
6. Залежність середньої довжини черги
від швидкості передачі за 1/10 обертання
всіх валів при частоті обертання
1 500хв-1,
при часі опитування FT232RL
0,1 с.
Fig.
6. Dependence of
the average
queue length on
the transmission
speed for 1/10
rotation of all
shafts at a
rotational speed
of 1 500 minutes-1 at the polling time of FT232RL
0.1 sec.
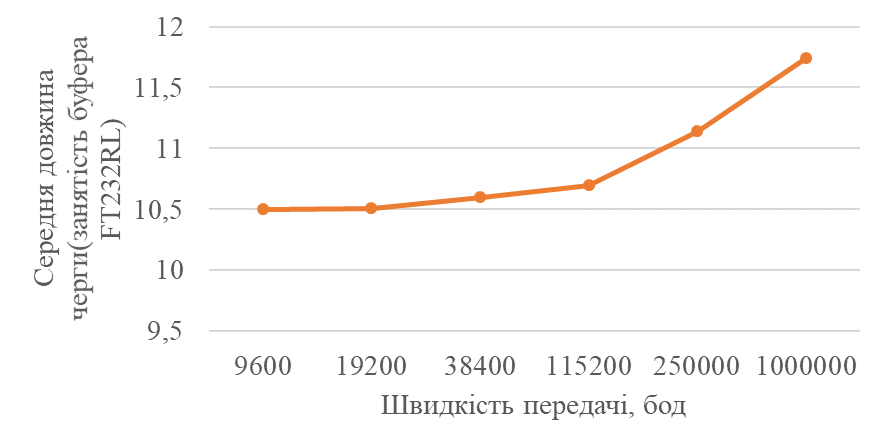
Рис.
7. Залежність середньої довжини черги
від швидкості передачі за повне обертання
всіх
валів при частоті обертання
1 500хв-1,
при часі опитування FT232RL
0,1 с.
Fig. 7. Dependence
of the average queue length on the transmission speed for the total
rotation of all
shafts at a rotational speed of 1 500 min.-1
at the polling time of FT232RL 0.1 sec.
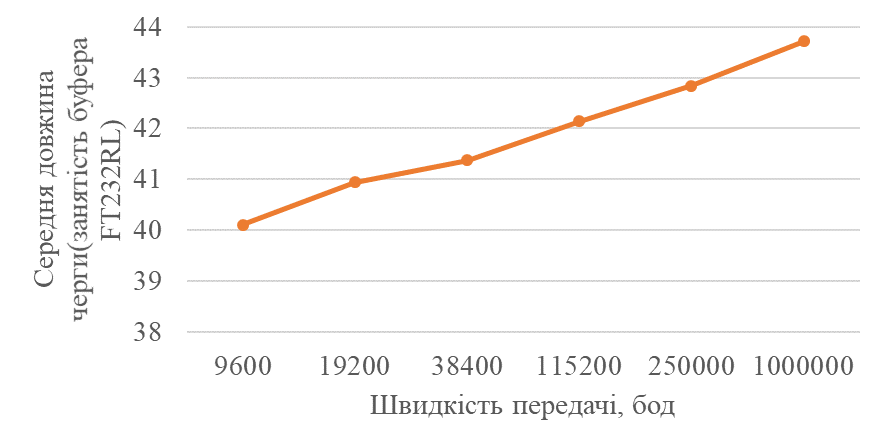
Рис.
8. Залежність середньої довжини черги
від швидкості передачі за повне
обертання всіх валів при частоті
обертання 1 500хв-1,
при часі опитування FT232RL
0,4 с.
Fig. 8. Dependence
of the average queue length on the transmission speed for the total
rotation of all
shafts at a rotational speed of 1 500 min.-1
at a polling time of FT232RL 0.4 sec.
Результати основних
серій експериментів показано на рис.
5–8.
Як видно
з рис. 5–6, при частоті обертання близько
1 500 хв-1
у хоча б одного з
датчиків середня зайнятість буфера
FT232RL буде практично однаковою до
максимально можливої швидкості,
включаючи 1 000 000
бод, навіть при зменшенні часу опитування
FT232RL. Незначний ріст пов'язаний з тим,
що експерименти велися з одним
максимальним числом заявок, після
обробки яких симуляція припинялась.
Також зменшення часу опитування нижче
0,0156 с фактично неможливо [2, 6, 7], що
пов’язано з точністю роботи таймеру
в ОС WINDOWS, на базі якої працює АРМ, причому
буфер буде фактично переповненим, тобто
дані не встигають вчасно передаватися
і FT232RL буде перевантажений, про що і
свідчать на практиці, у процесі
експлуатації системи, непоодинокі
збої.
Тому необхідно
провести ряд додаткових досліджень.
Очевидно, необхідно визначити раціональний
алгоритм обробки тахометричних даних
(за формулою (1) або за формулою (2). З
цією метою було проведено експерименти
з деякими модифікаціями моделі (зміна
алгоритму обробки сигналів від датчиків,
тобто зміни формул розрахунку з (1) на
(2). Результати експериментів показані
на рис 7. Як видно з рис. 7, при
застосуванні розрахункової формули
(2) частоти обертання, буфер практично
не заповнюється на всьому діапазоні
швидкостей (при часі опитування 0,1 с.).
При збільшенні частоти опитування
буфер буде заповнюватись фактично
наполовину, про що свідчить рис. 8.
При
максимальній швидкості 1 500
хв-1
на всіх трьох датчиках раціонально
застосувати таке рішення – зменшити
час опитування FT232RL до 0,1 с та змінити
алгоритм розрахунку, за якого розрахунок
частоти обертання виконувався б із
застосуванням формули (2), тобто, за одне
повне обертання валу. При такому рішенні
швидкість передачі даних можливо
залишити 9 600 бод, оскільки в заводських
умовах збільшення швидкості передачі
може призвести до збільшення помилок
у передачі цих даних в умовах перманентних
електромагнітних завад.
Результати
Для існуючої
інформаційно-вимірювальної системи
випробувань гідравлічних передач
тепловозів були проведені дослідження
з метою визначення та теоретичного
розрахунку основних характеристик
каналів передачі даних від апаратних
перетворювачів даних сигналів аналогових
датчиків технологічних параметрів до
комп’ютера. Для дослідження тахометричної
підсистеми було створено імітаційну
модель, яка дозволила дослідити основні
характеристики каналів передачі даних
від апаратних перетворювачів даних
сигналів аналогових датчиків тахометричних
параметрів до комп’ютера. Був проведений
аналіз отриманих по результатам
теоретичних розрахунків та за допомогою
імітаційної моделі даних та визначено
раціональні налаштування системи
(швидкості передачі, часу опитування,
алгоритм розрахунку частоти обертання)
передачі даних.
Наукова новизна
та практична
значимість
Дослідження з метою
визначення та теоретичного розрахунку
основних характеристик каналів передачі
даних від апаратних перетворювачів
даних сигналів аналогових датчиків
технологічних параметрів частоти
обертання до комп’ютера показали, що
система працює у режимі фактичної
«відмови від обслуговування». Для більш
детальних досліджень процесів, які
протікають у системі передачі
тахометричних даних, в середовищі
MATLAB була створена імітаційна модель.
Дана модель дозволила провести ряд
експериментів. На основі експериментів
із моделлю були встановлені раціональні
шляхи розв’язання існуючої проблеми
роботи системи в режимі фактичної
«відмови від обслуговування». Також
впровадження одного із запропонованих
способів вирішення проблеми або їх
комбінування потребують подальших
досліджень у реальній системі.
Висновки
Були
проведені дослідження з метою визначення
та теоретичного розрахунку основних
характеристик каналу передачі (розмірів
буферу, частоти опитування, алгоритму
обробки тахометричних даних) , що
отримані від апаратних перетворювачів
даних сигналів аналогових датчиків
технологічних параметрів частоти
обертання до комп’ютера. Дослідження
показали, що система працює в режимі
фактичної «відмови від обслуговування»
(за існуючого алгоритму обробки
тахометричних даних [9] та швидкості
передачі даних 9 600 бод). Для більш
детальних досліджень процесів, які
протікають у системі передачі
тахометричних даних, в середовищі
MATLAB була створена імітаційна модель.
Дана модель дозволила провести ряд
експериментів із визначення раціональних
параметрів системи (розмірів буферу,
частоти опитування, алгоритму обробки
тахометричних даних). На основі
експериментів із моделлю були
запропоновані шляхи розв’язання
існуючої проблеми. При максимальній
швидкості 1 500
хв-1
для всіх трьох датчиків раціонально
застосувати таке рішення – зменшити
час опитування FT232RL до 0,1 с та змінити
алгоритм розрахунку, за якого розрахунок
частоти обертання виконувався б із
застосуванням формули (2) тобто за один
повний оберт валу. При такому рішенні
швидкість передачі даних можливо
залишити в 9 600 бод, оскільки в
заводських умовах збільшення швидкості
передачі може призвести до збільшення
помилок у передачі даних в умовах
перманентних високочастотних
електромагнітних завад.
СПИСОК ВИКОРИСТАНИХ
ДЖЕРЕЛ
- Белашов,
В. Ю. Мобильный экспериментальный
комплекс для исследования электромагнитных
полей, генерируемых электрооборудованием
и элементами электроэнергетических
систем / В. Ю. Белашов, А. И. Асадуллин
// Промышленная энергетика. – 2012. – №
8. – С. 52–55.
- Братуха,
М. А. Исследование точности отсчёта
временных интервалов в системе windows /
М. А. Братуха, О. Г. Шевченко // Інформатика
та комп’ютерні технології-2012 : матеріали
VIII
Міжнар. наук.-техн. конф. студентів,
аспірантів та молодих науковців / Донец.
нац. техн. ун-т. – Донецьк, 2012. – С. 59–63.
- Використання
методу вільного вибігу при визначенні
механічних втрат в гідравлічних
передачах при стендових випробуваннях
/ Б. Є. Боднар, О. Б. Очкасов, Р. О. Коренюк,
І. А. Клюшник // Проблемы и перспективы
развития ж.-д. транспорта : тез. 77 междунар.
науч.-практ. конф. (11–12 мая 2017 г.) /
Днепропетр. нац. ун-т ж.-д. трансп. –
Днепр, 2017. – С. 16–17.
- Эсауленко,
В. А. Методика и алгоритм расчета
переходных процессов в двигателе
постоянного тока последовательного
возбуждения / В. А. Эсуаленко, Н. С. Никорюк
// Вісн. Кременч. держ. політехн. ун-ту :
зб.
наук. пр. – Кременчук, 2006. – Вип. 3, ч. 2.
– С. 137–139.
- Information-measuring
Test System of Diesel Locomotive Hydraulic Transmissions / I. V.
Zhukovytskyy, I. A. Kliushnyk, O. B. Ochkasov, R. O. Korenyuk
// Наука та прогрес транспорту. – 2015. –
№ 5 (59). – С. 53–65. doi: 10.15802/stp2015/53159.
- Kołek,
K. Windows7 x64 as real-time measurement and control platform
/ K.
Kołek
// Przegląd Elektrotechniczny. – 2013. – Т. 89, No. 2 a. –
С. 68–71.
- Sellappan,
P. Response Time Considerations in Realtime Software Design /
P. Sellappan
//
Malaysian
Journal of Computer Science. – 2017. – Т. 9, No. 1. – С.
25–31.
- Urrea,
C. Implementation of error detection and correction in the
Modbus-RTU serial protocol / C. Urrea, С. Morales, J. Kern //
Intern. J. of Critical Infrastructure Protection. – 2016. – Т.
15. – С. 27–37.
doi:
10.1016/j.ijcip.2016.07.001.
- Zhukovytskyy,
I. Choice of the Optimal Parameters of Measuring the Shaft Rotation
Frequency of the Hydraulic Transmission of the Locomotive Using
Microcontroller / I. Zhukovytskyy, I. Kliushnyk // Наука та
прогрес транспорту. – 2017. – № 2 (68). –
С. 36–45. doi: 10.15802/stp2017/99945.
- Zhukovytskyy,
I. V. Use of Microcontroller for Measuring Shaft Speed of Diesel
Locomotive Hydraulic Transmission / I. V. Zhukovytskyy, I. A.
Kliushnyk // Наука та прогрес транспорту. –
2016. –
№ 5 (65). –
C. 43–53.
doi: 10.15802/stp2016/83990.
И.
А. КЛЮШНИК1*
1*Каф.
«Электронные вычислительные машины»,
Днепропетровский национальный
университет железнодорожного транспорта
имени академика В. Лазаряна,
ул. Лазаряна,
2, Днипро, Украина, 49010, тел. +38 (056) 373 15 89,
эл. почта klugran@i.ua, ORCID 0000-0001-9939-0755
ИССЛЕДОВАНИЕ
РАЦИОНАЛЬНЫХ ХАРАКТЕРИСТИК
КАНАЛОВ
ПЕРЕДАЧИ ДАННЫХ ИНФОРМАЦИОННО-
ИЗМЕРИТЕЛЬНОЙ
СИСТЕМЫ
Цель.
Статья ставит целью определение
рациональных параметров интерфейсов
передачи данных информационно-измерительной
системы испытаний гидравлических
передач тепловозов, а также нахождение
степени отказоустойчивости в различных
режимах работы системы. Методика.
В работе исследователем были определены
и теоретически рассчитаны основные
характеристики каналов передачи данных
от аппаратных преобразователей сигналов
аналоговых датчиков технологических
параметров к компьютеру. Для более
полной оценки была создана имитационная
модель в среде MATLAB для
исследования поставленной задачи.
Анализ результатов теоретических
расчетов, полученных с помощью
имитационной модели с целью определения
рациональных настроек интерфейсов
(скорости передачи, элементной базы,
структуры системы и т. д.) передачи
данных, позволяет определить необходимые
характеристики системы. Результаты.
Для существующей информационно-измерительной
системы испытаний гидравлических
передач тепловозов были проведены
исследования с целью определения и
расчета основных характеристик каналов
передачи данных от аппаратных
преобразователей сигналов аналоговых
датчиков технологических параметров
к компьютеру. Для исследования
тахометрической подсистемы была создана
имитационная модель, которая позволила
исследовать основные характеристики
каналов передачи данных от аппаратных
преобразователей сигналов аналоговых
датчиков тахометрических параметров
к компьютеру. Был проведен анализ
данных, полученных по результатам
теоретических расчетов и с помощью
имитационной модели, и определены пути
рациональной настройки их передачи.
Научная новизна.
Исследование и теоретические расчеты
основных характеристик каналов передачи
данных от аппаратных преобразователей
сигналов аналоговых датчиков к компьютеру
показали, что система работает в режиме
фактического «отказа от обслуживания».
Для более детальных исследований
процессов, протекающих в системе
передачи тахометрических данных, в
среде MATLAB была создана имитационная
модель, которая позволила провести ряд
экспериментов. Практическая
значимость. На основе
экспериментов с моделью были установлены
рациональные пути решения существующей
проблемы: работы системы в режиме
фактического «отказа от обслуживания».
Также внедрение одного из предложенных
способов решения проблемы или их
комбинирование требуют дальнейших
исследований в реальной системе.
Ключевые
слова: имитационная
модель; MATLAB; SIMULINK;
гидравлическая передача; испытания
гидропередач; испытательный стенд;
информационно-измерительная система
I.
A. KLIUSHNYK1*
1*Dep.
«Electronic Computers», Dnipropetrovsk National
University of
Railway Transport named after Academician
V. Lazaryan, Lazaryan
St., 2, Dnipro, Ukraine, 49010,
tel. +38 (056) 373 15 89, e-mail klugran@i.ua
,
ORCID 0000-0001-9939-0755
RESEARCH OF
RATIONAL CHARACTERISTICS
OF THE DATE COMMUNICATION LINKS
OF THE
INFORMATION AND MEASURING SYSTEM
Purpose.
The
article focuses on determining the rational parameters of data
transmission interfaces for information and measuring system for
testing the hydraulic transmissions, as well as determining the
degree of fault to-lerance in various operating modes of the system.
Methodology.
In the study the researcher has determined and theoretically
calculated the main characteristics of the data transmission
channels from the hardware converters of the data signals of analog
sensors of technological parameters to the computer. For a more
complete assessment, an imitation model was created in the MATLAB
environment to study the assigned task. Analysis of the results
obtained from the theoretical calculations and using the simulation
data model to determine the rational settings of interfaces
(rational transmission speed, rational element base, rational system
structure, etc.) of data transmission makes it possible to determine
the rational characteristics of the system. Findings.
For the existing information-measuring system for testing hydraulic
locomotive transmission of diesel locomotives, studies were carried
out to determine and theoretically calculate the main
characteristics of the data transmission channels from the hardware
converters of data signals from analog sensors of technological
parameters to the computer. To study the tachometric subsystem, an
imitation model was created that allowed to investigate the main
characteristics of the data transmission channels from the hardware
converters of data signals of analog sensors of tachometric
parameters to the computer. The results of theoretical calculations
were analyzed and the rational settings of the data transmission
system were determined using the simulation model of data.
Originality.
The study to determine and theoretically calculate the main
characteristics of the data transmission channels from the hardware
converters of data signals of analog sensors of technological
parameters to the computer showed that the system operates in the
mode of actual «non-maintenance». For more detailed studies of the
processes occurring in the transmission system of tachometric data,
an imitation model was created in the Matlab environment. This model
allowed carrying out a number of experiments. Practical
value.
On the basis of experiments with the model, rational ways of solving
the existing problem of the system operation in the mode of actual
«non-maintenance» were established. Also, the introduction of one
of the proposed methods for solving the problem or combining them
requires further research in the real system
Keywords:
simulation model; MATLAB; SIMULINK; hydraulic transmission;
hydrotransmission tests; test stand; information-measuring system
REFERENCES
Belashov,
V. Y., & Asadullin, A. I. (2012). Mobilnyy eksperimentalnyy
kompleks dlya issledovaniya elektromagnitnykh poley,
generiruemykh elektrooborudovaniem i elementami
elektroenergeticheskikh sistem. Promyshlennaya
energetika, 8,
52-55. (in Russian)
Bratukha,
M. A., & Shevchenko, O. G. (2012). Issledovanie tochnosti
otscheta vremennykh intervalov v sisteme windows. Informatyka
ta kompiuterni tekhnolohii-2012: materialy VIII Mizhnarodnoi
naukovo-tekhnichnoi konferentsii studentiv, aspirantiv ta
molodykh naukovtsiv,
59-63. (in Russian)
Bodnar,
B. Y., Ochkasov, O. B., Koreniuk, R. O., & Kliushnyk, I. A.
(2017). Vykorystannia metodu vilnoho vybihu pry vyznachenni
mekhanichnykh vtrat v hidravlichnykh peredachakh pry stendovykh
vyprobuvanniakh. Abstracts
of the 77 International Scientific & Practical Conference
“The Problems and Prospects of Railway Transport Development”,
16-17. (in Ukrainian)
Esaulenko,
V. A., & Nikoryuk, N. S. (2006). Metodika i algoritm
rascheta perekhodnykh protsessov v dvigatele postoyannogo toka
posledovatelnogo vozbuzhdeniya. Transactions
of Kremenchuk Mykhailo Ostrohradskyi National University,
3(2),
137-139. (in Russian)
Zhukovytskyy,
I. V., Kliushnyk, I. A., Ochkasov, O. B., & Korenyuk, R. O.
(2015). Information-measuring Test System of Diesel Locomotive
Hydraulic Transmissions. Science
and Transport Progress, 5(59),
53-65. doi: 10.15802/stp2015/53159. (in Russian)
Kołek,
K. (2013). Windows7 x64 as real-time measurement and control
platform. Przegląd
Elektrotechniczny, 89(2a),
68-71. (in English)
Sellappan,
P. (2017). Response Time Considerations in Realtime Software
Design. Malaysian
Journal of Computer Science, 9(1),
25-31. (in English)
Urrea,
C., Morales C., & Kern, J. (2016). Implementation of error
detection and correction in the Modbus-RTU serial protocol.
International
Journal of Critical Infrastructure Protection, 15,
27-37.
doi: 10.1016/j.ijcip.2016.07.001. (in English)
Zhukovytskyy,
I., & Kliushnyk, I. (2017). Choice of the Optimal Parameters
of Measuring the Shaft Rotation Frequency of the Hydraulic
Transmission of the Locomotive Using Microcontroller. Science
and Transport Progress, 2(68),
36-45. doi: 10.15802/stp2017/99945. (in English)
Zhukovytskyy,
I. V., & Kliushnyk, I. A. (2016). Use of Microcontroller for
Measuring Shaft Speed of Diesel Locomotive Hydraulic
Transmission. Science
and Transport Progress, 5(65),
43-53.
doi: 10.15802/stp2016/83990. (in English)
Стаття рекомендована
до публікації д.т.н., проф. І. В. Жуковицьким
(Україна)
Надійшла
до редколегії: 09.10.2017
Прийнята
до друку: 08.01.2018